Simulación de mecanizado por programa NC
El modo de simulación de mecanizado por programa NC (NC) le permite tener en cuenta las peculiaridades de la implementación postprocesador al simular el mecanizado. En este modo, el sistema genera automáticamente el NC para cada operación durante su cálculo. El control de simulación se realiza de la misma manera que en el control de simulación normal.
Habilitar el modo de modelado por NC.
El encendido se realiza con el botón  en la barra de herramientas, cuando <Modeling> la ficha está activa.
en la barra de herramientas, cuando <Modeling> la ficha está activa.
Nota: El botón no se encuentra disponible para alternar si el modo multitarea se utiliza;
Parámetros del modo de simulación por programa NC.
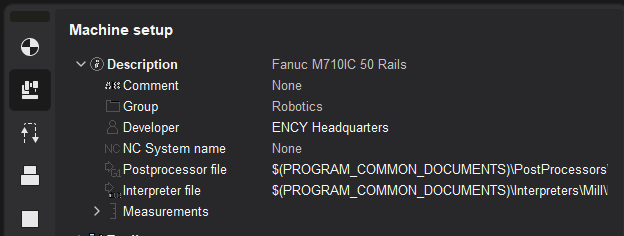
Simulación por el texto del programa de control se realiza sobre la base de la selección archivo postprocesador y archivo de intérprete definido en el panel de parámetros < Maquinaria> de la máquina herramienta.
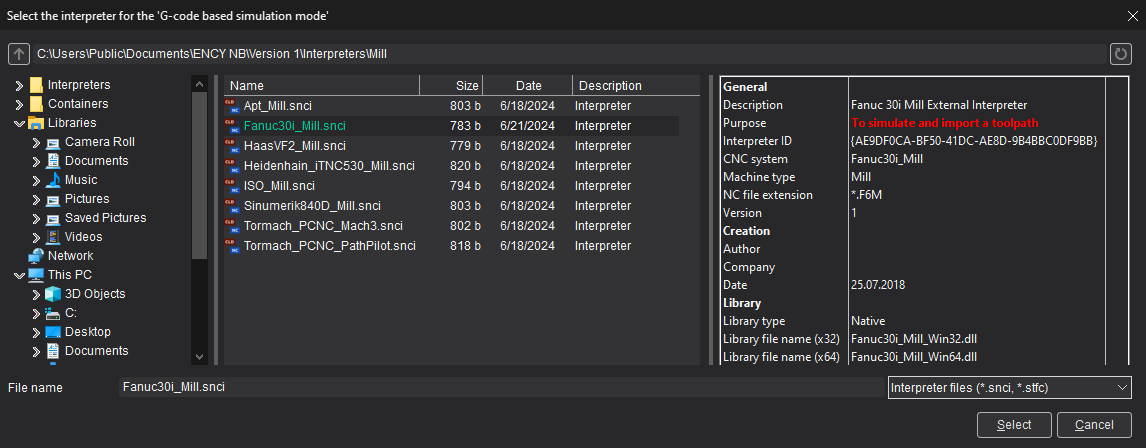
El intérprete es un archivo de configuración de control de máquina herramienta (*.snci) ubicado en el Directorio $(PROGRAM_PERSONAL)/Intérpretes.
Durante el proceso de selección, un panel de vista previa de la información de los intérpretes (descripción, propósito, tipo de soporte, autores, y más) está disponible:
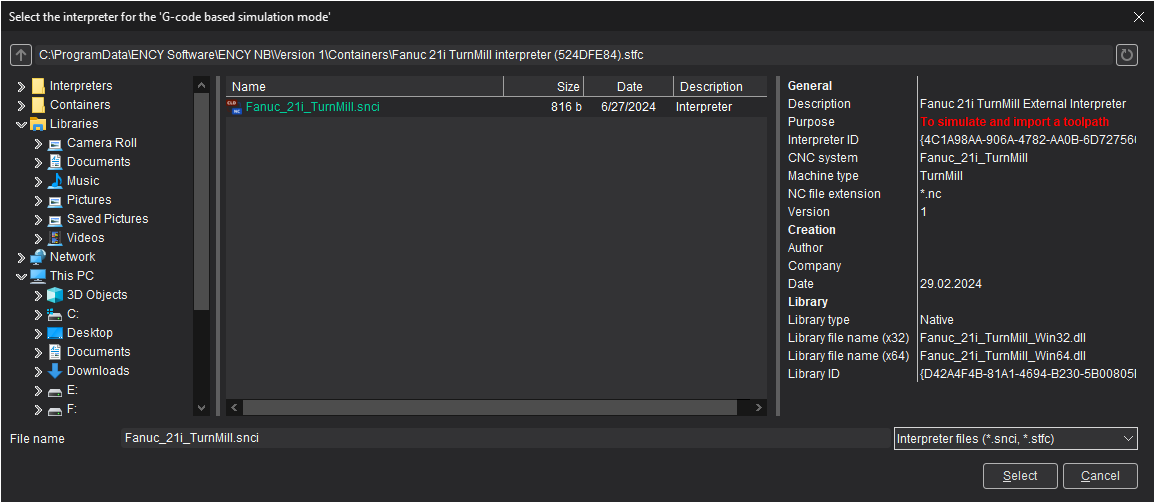
Se admite la posibilidad de seleccionar un intérprete de un contenedor. Para ello, obtenga un contenedor con intérprete. A continuación, abra la ventana de selección de intérpretes y vaya a la carpeta de contenedores.
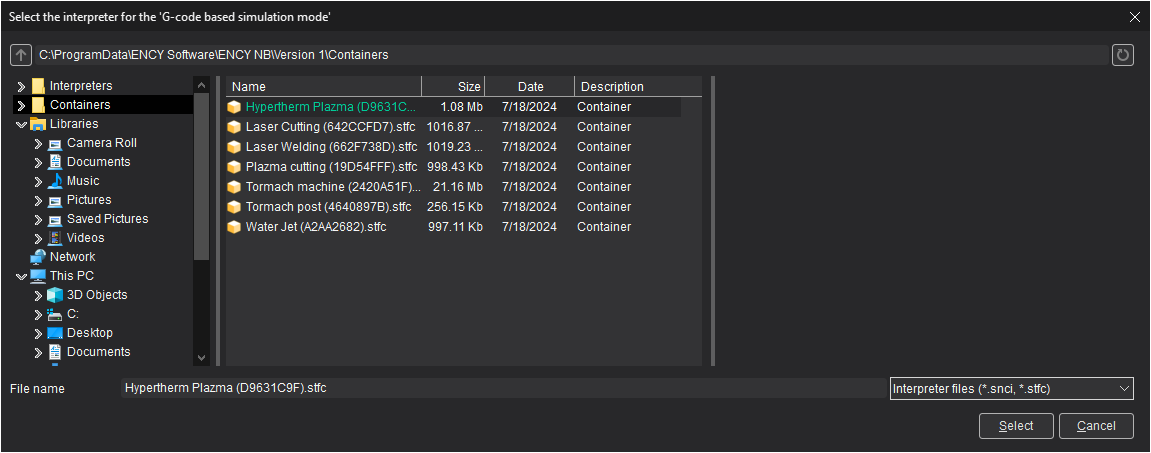
Inicie sesión en el contenedor resultante como carpeta, seleccione el intérprete para modelar dentro del contenedor.
Definir el postprocesador e intérprete predeterminados en el diagrama cinemático de la máquina herramienta
Es posible configurar el nombre del archivo postprocesador y el nombre del archivo intérprete “por defecto” en el diagrama cinemático de la máquina. Para ello, agregue etiquetas SPPFile, SNCIFile con referencias a los archivos correspondientes al archivo XML del diagrama de la máquina y reinicie el sistema CAM.
Ahora, cuando seleccione la máquina en el sistema CAM, el postprocesador y el intérprete ya estarán configurados y sus valores se obtendrán del diagrama cinemático. Si es necesario, desde la interfaz de usuario de ENCY, los valores postprocesador e intérprete pueden ser anulados para el proyecto actual.
Ejemplo
<SCType ID=“Fanuc 30i” Título=“”Fanuc 30i“ type=”“Fanuc30i” Habilitado=“verdadero”>
<... otras etiquetas ... />
<SPPPFile DefaultValue=“$(PROGRAM_PERSONAL)\Postprocessors\Mill\Fanuc (30i)_Mill.sppx”/>
<SNCIFile DefaultValue=“$(PROGRAM_PERSONAL)\Intérpretes\Mill\Fanuc (30i)_Mill.snci”/>.
<... otras etiquetas ... />
</SCType>
Actualmente se dispone de intérpretes de los siguientes sistemas CNC:
|
Grupo de máquinas |
Sistema CNC |
Comentario |
Nota |
|
Fresado |
APT |
Importar sólo el camino de herramientas |
|
|
Apt_Simplify_3D |
Importar sólo el camino de herramientas |
|
|
|
ISO |
Importar sólo el camino de herramientas |
|
|
|
Control mundial |
Importar sólo el camino de herramientas |
Se requiere una licencia adicional |
|
|
Fanuc 30i |
Para simular e importar un camino de herramientas |
|
|
|
Haas VF-2 |
Para simular e importar un camino de herramientas |
|
|
|
Heidenhain iTNC 530 |
Para simular e importar un camino de herramientas |
|
|
|
Mazatrol SmoothG |
Para simular e importar un camino de herramientas |
Se requiere una licencia adicional |
|
|
NC210 |
Para simular e importar un camino de herramientas |
Se requiere una licencia adicional |
|
|
Sinumerik 840D |
Para simular e importar un camino de herramientas |
|
|
|
Tormach PCNC Mach3 |
Para simular e importar un camino de herramientas |
|
|
|
Tormach PCNC PathPilot |
Para simular e importar un camino de herramientas |
|
|
|
Girando |
Mazatrol SmoothC |
Para simular e importar un camino de herramientas |
Se requiere una licencia adicional |
|
Moldeado giratorio |
Fanuc 21i |
Para simular e importar un camino de herramientas |
Se requiere una licencia adicional |
|
NC220 |
Para simular e importar un camino de herramientas |
Se requiere una licencia adicional |
|
|
Sinumerik 840D |
Para simular e importar un camino de herramientas |
|
|
|
Okuma OSP-P300 |
Para simular e importar un camino de herramientas |
Se requiere una licencia adicional |
|
|
Robot |
Robot Fanuc (controlador R-30iB) |
Para simular e importar un camino de herramientas |
|
|
Robot Kuka |
Para simular e importar un camino de herramientas |
|
|
|
Robot Motoman |
Para simular e importar un camino de herramientas |
|
|
|
Robot ABB |
Para simular e importar un camino de herramientas |
|
|
|
Robot Nachi (formato AW) |
Para simular e importar un camino de herramientas |
Se requiere una licencia adicional |
Nota: Todos los intérpretes soportan la lista de comandos generada por los postprocesadores en el kit de distribución del sistema CAM solamente.
Los intérpretes "Import toolpath only" no son compatibles con el código NC de la línea - trayectoria del movimiento de la herramienta.
Cuando seleccione un intérprete, preste atención a su propósito (el Finalidad campo en el panel Vista previa)

El intérprete seleccionado debe estar destinado a la simulación. De lo contrario, la trayectoria de la herramienta puede ser incorrecta (desplazada en relación con el sistema de coordenadas de la pieza de trabajo, aproximaciones/retractos duplicados, posición inicial incorrecta, etc.).
Características del modelado por NC
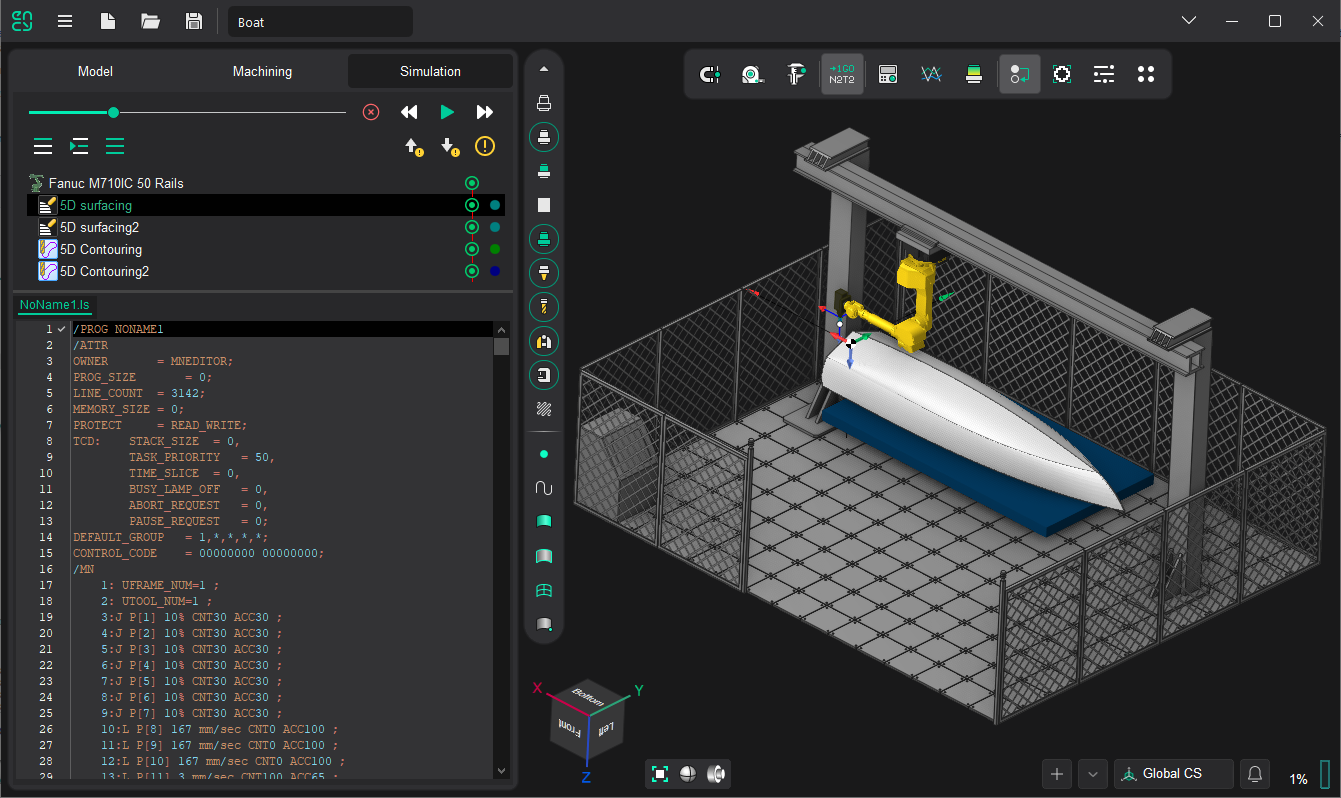
Si el modo está activado, después calcular la trayectoria de la herramienta, ENCY generará automáticamente un programa de control para la máquina CNC con un archivo preseleccionado de configuración postprocesador, y convertirá el texto del programa de control en una trayectoria de herramienta. La ruta de herramientas generada tendrá en cuenta los detalles de la implementación postprocesador. El texto del programa de control para la operación seleccionada se muestra en la parte inferior de la página de modo < Simulación > , inmediatamente después de la lista de operaciones de proceso.
Después de un breve retraso del puntero del ratón sobre la línea con el texto del programa de control, la descripción de los nodos asociados del árbol de trayectoria (comandos tecnológicos CLData) aparece en la punta de la herramienta.
Nota: La punta de la herramienta se puede ocultar moviendo el puntero del ratón ligeramente o presionando cualquier tecla, por ejemplo [Esc] o una de las teclas para navegar a través del texto del programa de control: [↓] o [↑].
A la izquierda del texto del programa de control hay un campo de servicio para mostrar información auxiliar. Además del número, el estado de todos los nodos asociados en el árbol de trayectoria se muestra para cada línea. Los valores de los iconos mostrados son similares a los utilizados para los comandos de proceso de CLData. De esta manera, puede identificar sin ambigüedades el marco del programa de control en el que existen nodos de árbol de trayectoria erróneos. Botones ![]() y
y ![]() permite navegar a través del texto del programa de control entre errores.
permite navegar a través del texto del programa de control entre errores.
Apoyo a intérpretes externos.
El archivo de configuración del intérprete (*.snci) debe contener una referencia a la biblioteca del programa que se utiliza para interpretar el texto del programa de control. La página Creación de su propio intérprete describe el proceso de creación de su propio intérprete: configuración del archivo y la interfaz del programa de aplicación (API).
Vídeo sobre la verificación del código G
Véase también:
Proceso de simulación de control