Requisitos de la máquina para las operaciones de movimiento en pieza
Las operaciones de movimiento de piezas pueden estar disponibles en cualquier tipo de máquina-herramienta: centro de fresado, torno con pernos, robot industrial. El requisito principal de la máquina-herramienta es la existencia del soporte especial de la herramienta que está marcado como pinza. Si la pinza no está presente en el esquema actual de la máquina, entonces no estará disponible la operación de movimiento de piezas.
Puede activar esta opción en el configuración de la máquina página o en el archivo de descripción del esquema de máquina.
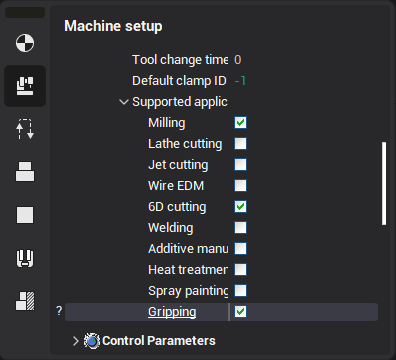
A continuación se muestra el fragmento del esquema de la máquina sobre el definitón del portaherramientas. Gripper está activado dentro de la SoportadoTipos deHerramientas.
<SCType ID="MillSpindle" Caption="Mill Spindle" Type="TToolHolderNode">
<VisualProperties>
<Metallic DefaultValue="True"/>
</VisualProperties>
<XAxisID DefaultValue="AxisX"/>
<YAxisID DefaultValue="AxisY"/>
<ZAxisID DefaultValue="AxisZ"/>
<SupportedToolTypes>
<MillTool DefaultValue="true"/>
<LatheCutter DefaultValue="true"/>
<Gripper DefaultValue="true"/>
</SupportedToolTypes>
</SCType>
Adaptación de los tornos de torneado con subtorneado
Para mover la pieza de trabajo entre el husillo principal y el subtorno en el fresador giratorias se puede utilizar la operación de pick and place para mover la pieza de trabajo entre el husillo principal y el subtorno. Para que sea posible, el subtorno debe ser declarado como soporte de herramientas con la aplicación de agarre. Si tiene el esquema de máquina de fresado giratoria con subtorno diseñado para el sistema CAM y antes, debe modificar la descripción de la máquina. A continuación se muestran las diferencias entre los esquemas antiguos (izquierda) y adaptados (derecha).
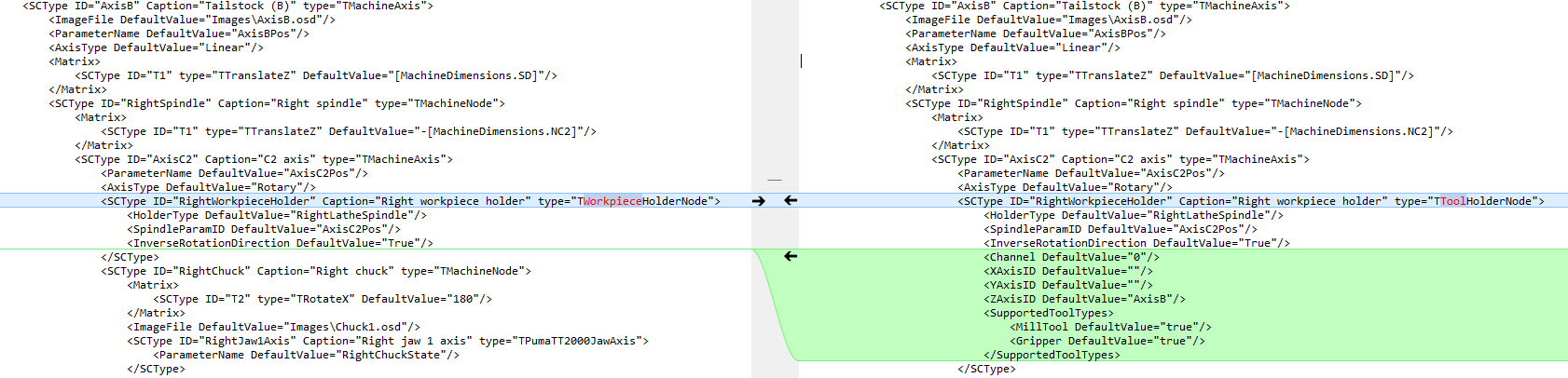
1. En la definición de subspindle TWorkpieceHolderNode se sustituye por el texto siguiente: TToolHolderNode.
2. XAxisID, YAxisID, ZAxisID - se añaden los nombres de los ejes responsables del movimiento de la herramienta a lo largo del eje correspondiente.
3. Gripper se añade en el Tipo deherramientas soportadas