Control de dispositivos de sujeción
Mueva las operaciones de piezas a menudo necesita control sobre el dispositivo que se utiliza para transferir la pieza de la posición inicial a la final, por ejemplo para separar las mandíbulas antes de recoger la pieza y cerrarlas después de fijar la pieza. Esta función de abrazadera permite insertar automáticamente comandos CLData para cambiar el estado del dispositivo de abrazadera durante el proceso de transferencia de un soporte de pieza a otro.

Nuevo comando CLData
Nuevo comando especial CLData se utiliza para indicar el cambio del estado del dispositivo de abrazadera. Este comando se tiene en cuenta durante la simulación del proyecto y también se envía al postprocesador como el comando especial "M".Pinza> El comando CLData tiene el siguiente formato:
Pinza <ID de la abrazadera>: Activado/desactivado, Dir(<Dirección>)
<Clamp ID> es el número único, utilizado para identificar el dispositivo de abrazadera específico. Consulte la sección sobre la creación del dispositivo de abrazadera para ver cómo se puede asignar el id de abrazadera.
Activado/desactivado es la bandera que indica si hay que agarrar o soltar la pieza, respectivamente.
<Dirección> es el entero (+1/-1/0) que indica la dirección del movimiento de la abrazadera durante el proceso de sujeción/desbloqueo. Consideremos el proceso de fijación. Si las mordazas se empujan hacia adentro para fijar la pieza (el valor del eje para la posición desbloqueada es mayor que el valor del eje para la posición de sujeción), entonces la dirección es "-1"; si las mordazas se empujan hacia fuera para fijar la pieza (la mordaza está dentro de la parte), entonces la dirección es "+1". Para la desbloqueo, la dirección se invierte. "0" dirección indica los mismos valores del eje de abrazadera para el estado de sujeción/desbloqueado (generalmente es un error en los parámetros del dispositivo de fijación).
Control automático de la abrazadera
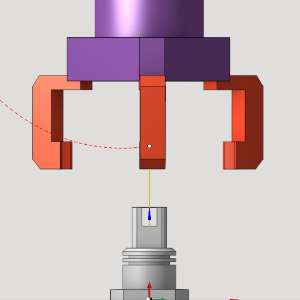
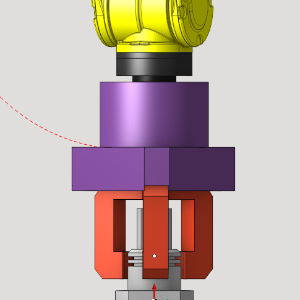
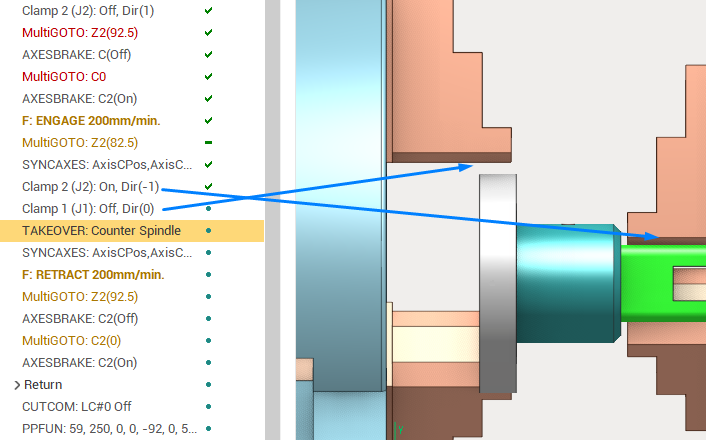
Las operaciones de la Operaciones de traslado de piezas grupo, como por ejemplo Pick-and-place, puede salir el <Pinza> Comandos CLData automáticamente cuando se produce la transferencia de pieza de un portapiezas a otro. Esta transferencia se realiza por el <Toma de posesión> Comando CLData. Si está activado por los parámetros de operación, el <Pinza> los comandos se generan automáticamente para simular un proceso típico de transferencia de piezas (ejemplo mostrado en la imagen anterior), lo que asegura que la pieza esté constantemente en poder de algún dispositivo:
Fijación de la pinza de destino (Lámpara 2: Activada)
Desbloquear la abrazadera inicial (Lámpara 1: Desactivada)
Toma de la pinza inicial a la diana (takeover)
Parámetros de control de la abrazadera
Los Operaciones de traslado de piezas tienen los siguientes parámetros que afectan a la salida de los comandos de control de abrazadera.
Los Operaciones de traslado de piezas en general puede funcionar con hasta 3 portapiezas que corresponden a 3 etapas del proceso de recogida y colocación.
La pieza está situada en el soporte inicial de la pieza
La pieza se mueve usando la pinza (que también es un portapiezas)
La pieza se coloca en el portapiezas final
Los parámetros de la pinza tienen 3 grupos de parámetros que corresponden a las etapas anteriores. Los soportes de piezas de diferentes etapas pueden coincidir, también algunas de las operaciones en este grupo tienen el proceso más simple para mover la pieza. Esto también se refleja en los parámetros de la pinza. Consideremos los parámetros de una sola etapa.
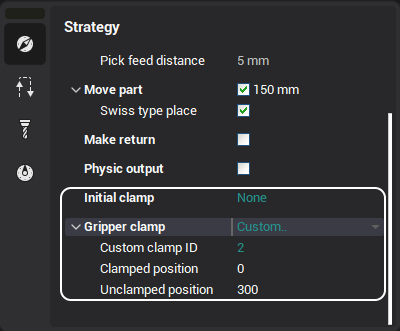
Dispositivo de sujeción cuadro combinado permite seleccionar la abrazadera que se utiliza para la etapa de movimiento de la pieza dada. Vea la sección de abajo sobre cómo hacer el dispositivo de abrazadera disponible para la selección en esta lista. Este parámetro también puede ser <Ninguno>, lo que significa que no se emite ninguna orden. El <Personalizado> elemento de enumeración permite especificar explícitamente el ID de abrazadera del dispositivo, incluso si no está presente en el esquema de la máquina o entre los accesorios.
Posición cerrada es el valor del eje que corresponde al estado <Clamped> del dispositivo en la etapa de movimiento dada.
Posición sin clavijas es el valor del eje que corresponde al estado <Unclamped> del dispositivo en la etapa de movimiento dada.
Vea los proyectos distributivos con las operaciones "Mover parte" para un ejemplo sobre cómo definir los parámetros de la abrazadera.
Añadiendo dispositivo de abrazadera al proyecto
El proyecto tiene la lista de dispositivos de abrazadera donde cada dispositivo se identifica con el ID entero. Esta lista se forma automáticamente y se utiliza para la selección del dispositivo de abrazadera para cada etapa parcial de movimiento. Actualmente, hay 3 tipos de dispositivos de abrazadera.
Pinza de fijación
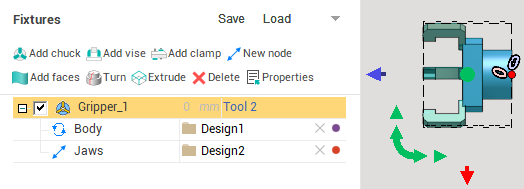
En la pestaña "Fixtures" de los parámetros Máquina/etapa/parte puede crear el dispositivo de sujeción con el "Añadir drick", "Añadir vis" o "Añadir abrazadera" botón, o cargar el modelo de abrazadera de la .mcp file. Los parámetros de fijación se pueden utilizar para modificar el modelo de abrazadera, por ejemplo, para establecer el valor mínimo y máximo para el nodo "eje" de la abrazadera de fijación. Accesorios documentación para más información sobre la creación de accesorios y sus parámetros.
Eje especial, creado en el Fabricante de máquinas. Por ejemplo, se puede crear una herramienta de soldadura de agarre o tack con la bandera especial "clamp" en el fabricante de la máquina como un eje de la máquina (no de fijación), y este eje se utilizará cambiar el estado de la pinza. También la fijación automática / desclamping de tal dispositivo está disponible mediante el Operaciones de traslado de piezas. Para obtener más información sobre cómo crear este dispositivo de abrazadera consulte la documentación "CAM System Machine Maker".
Ejes de "mandíbula paramétrica" . Muchas máquinas de torno tienen las mordazas de husillo o contrahusillo que se definen específicamente en el archivo de esquema de la máquina. Se rotan junto con el husillo y se tienen en cuenta durante la simulación y la detección de colisión. Esos ejes de mandíbula automáticamente reconocidos también se añaden a la lista de abrazaderas de la máquina. Turn-Milling/Takeover.stcp proyecto distributivo para un ejemplo de este esquema de máquina y el uso de abrazaderas en el MTM toma el control operación.