Editar la ruta de la herramienta
Existe la posibilidad de editar la secuencia de los comandos CLDATA. La ruta de la herramienta reinicia todos los cambios.
El nodo seleccionado de la ruta de la herramienta puede ser eliminado, copiado o cortado en el portapapeles por el menú contextual o por las teclas estándar:
[Del] – elimina el nodo actual del árbol de ruta de la herramienta;
[Ctrl+X] – corta el nodo actual del árbol de ruta de la herramienta en el portapapeles;
[Ctrl+C] – copiar el nodo actual del árbol de ruta de la herramienta en el portapapeles;
[Ctrl+V] – inserta el comando desde el portapapeles antes del nodo actual.
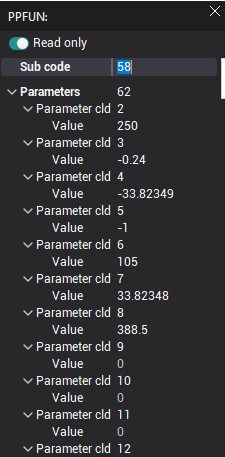
Haga doble clic en el nodo o seleccione el elemento <Edit> del menú contextual para editar los parámetros del comando CLDATA seleccionado. El diálogo abierto no es modal, es decir, no hay necesidad de cerrar el cuadro de diálogo para editar otro nodo. El título del diálogo es un tipo del nodo editado. La lista de los parámetros depende del tipo de nodo. Para iniciar la edición de los parámetros debe desactivar el modo de sólo lectura.
Aproximación/Edición de retorno
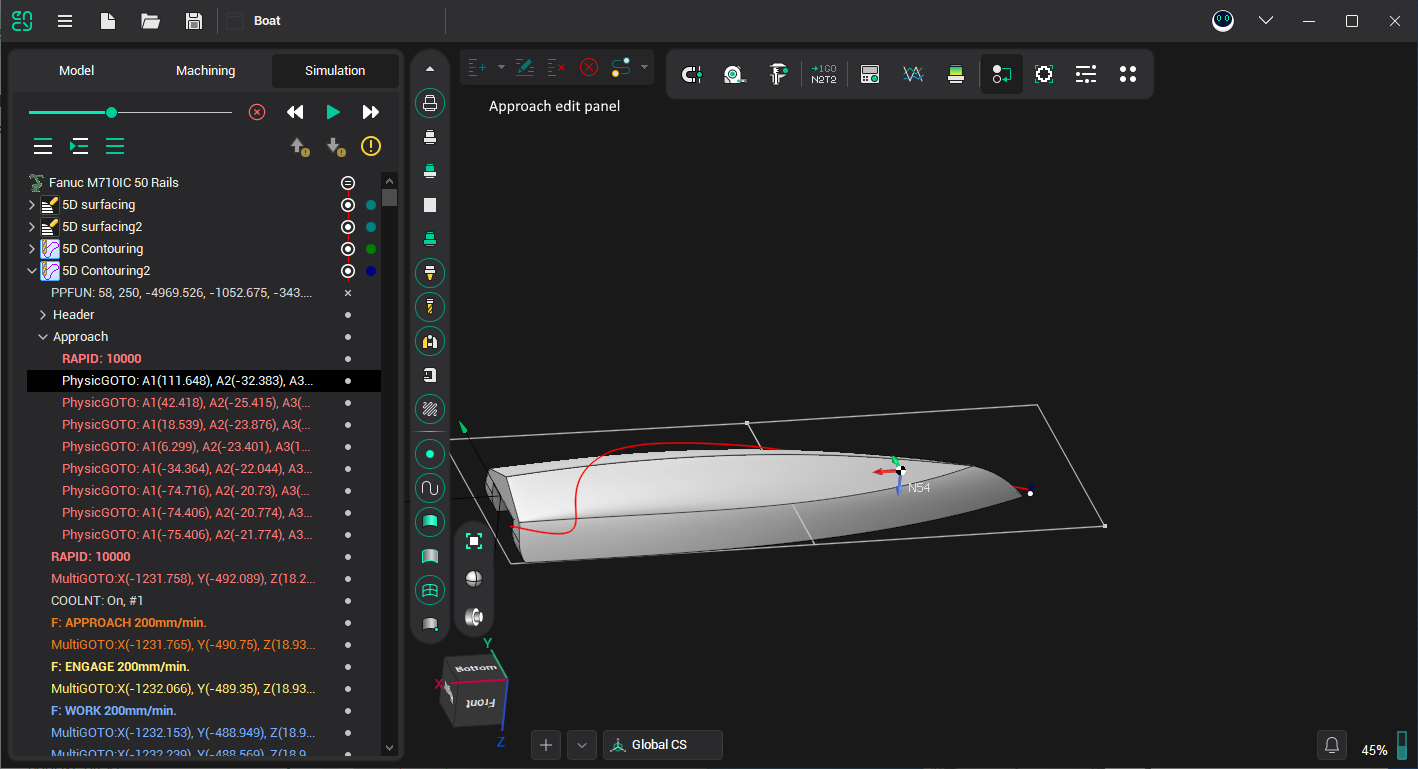
Si el usuario seleccionó la sección 'Aproach' o 'Return' dentro del árbol de ruta de la herramienta, el panel adicional se hace visible (imagen de pantalla). En este panel los siguientes botones están disponibles para una edición más conveniente de la sección de acercamiento o retorno (los botones se listan de izquierda a derecha):

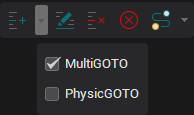
Insertar estado actual: este comando inserta el estado actual de la máquina como un nodo del árbol de ruta de la herramienta. El estado se inserta antes del nodo seleccionado actual del árbol.
El menú desplegable se puede usar para cambiar el tipo de nodo insertado (PhysicGOTO o MultiGOTO).
Editar estado actual – pulse este botón para empezar a editar el estado de ruta de la herramienta seleccionado de forma interactiva. Las coordenadas del nodo seleccionado se sincronizan con el estado actual de la máquina. Para finalizar el proceso de edición interactiva pulse este botón de nuevo.
Borrar estado actual – elimina el nodo actual del árbol de ruta de la herramienta.
Borrar aproximación/retorno – borra todos los comandos dentro de aproximación o sección de retorno excepto el último (que corresponde al estado final de aproximación/retorno).
Calcular con Motion Planner - construir trayectoria de aproximación o retorno automáticamente utilizando uno de los algoritmos para la planificación de movimiento con exclusión de colisiones entre los nodos de la máquina. Varios parámetros del planificador de movimiento, como el límite de tiempo para el cálculo de la ruta, se pueden especificar en el menú desplegable.
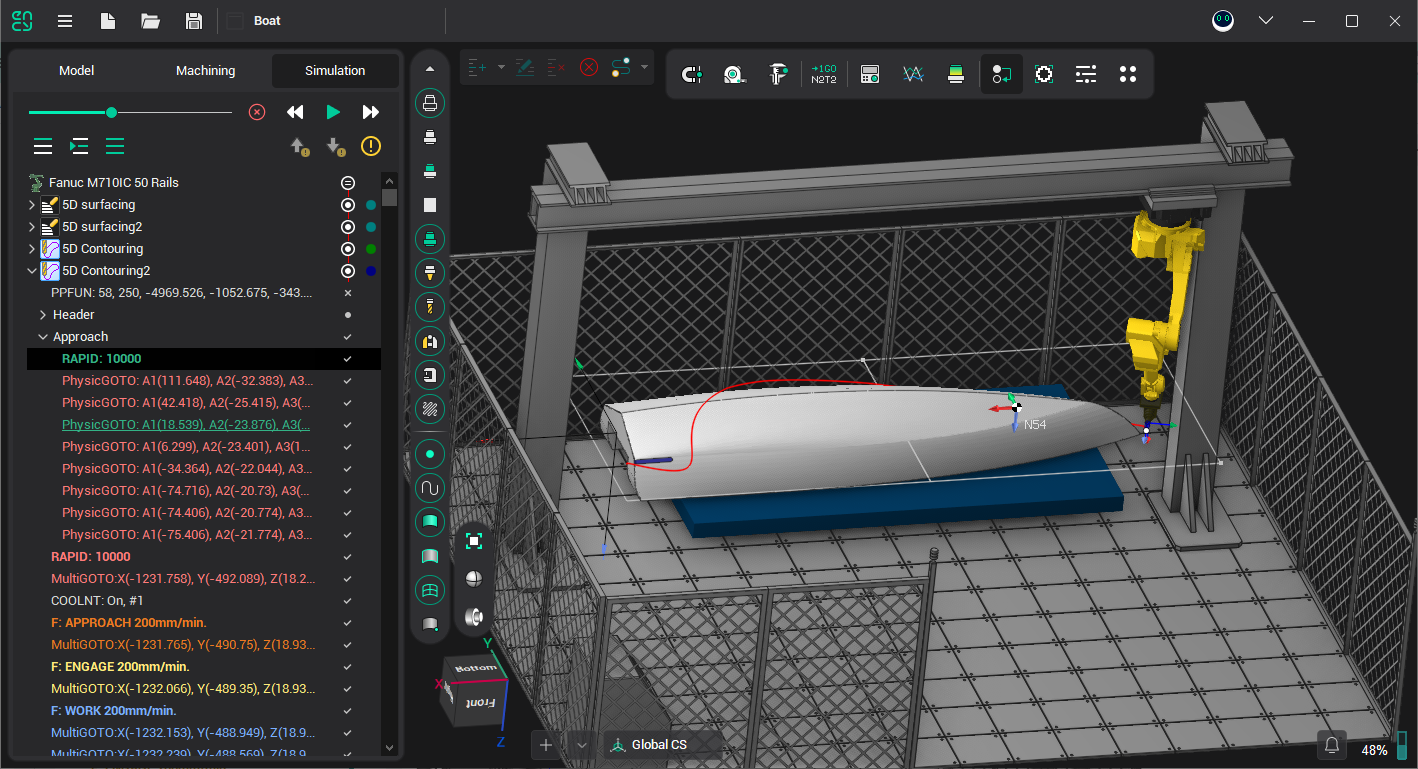
En esta captura de pantalla toda la trayectoria de aproximación se generó automáticamente usando el planificador de movimiento. Si la trayectoria generada no es satisfactoria la edición interactiva se puede utilizar para arreglar la ruta de aproximación/retorno.