Importar objetos de archivos 5DC
< 5DC > formato permite cargar un splines como un conjunto de puntos (xyzijk). Los Características principales:
-
se mantiene sólo el formato de texto UTF-8 codificado
-
permite contener múltiples splines: como separador, utilice el símbolo ";" (semicolon) en una nueva línea. Después del símbolo, puede especificar el nombre de la curva.
-
número mínimo de puntos de espoleta (líneas) no debe ser inferior a 2
-
la primera línea del archivo en lugar de puntos puede contener ajustes
Si la primera línea del archivo no contiene ninguna configuración, entonces para cada línea incluyendo la primera:
-
los números de coordenadas están separados por un espacio
-
punto se proporciona como 6 números: "X Y Z NX NY NZ", cuando (X, Y, Z) - coordenadas de un punto , (NX,NY,NZ) - vector normal
Si la primera línea del archivo contiene la configuración, entonces para cada línea excepto la primera:
-
el número de coordenadas está separado por el separador especificado en la línea de configuración
-
el punto se representa como números múltiples, de acuerdo con el formato especificado en la línea de configuración
Si la línea de configuración está definida, debe contener tres parámetros obligatorios y puede contener seis parámetros opcionales. Los parámetros deben estar separados por un espacio.
Parámetros obligatorios:
-
Formato de número de puntos:
|
|
Formato |
Descripción |
Número de puntos en una línea |
|
1 |
tffNormalVector |
Coordenadas del punto y normales |
6 |
|
2 |
tffQuaternion |
Coordenadas del punto y cuaternión X Y Z W |
7 |
|
3 |
tffEulerXYZ |
Coordenadas del punto y ángulos de Euler Rx Ry Rz con rotaciones alrededor de los ejes móviles |
6 |
|
4 |
tffEulerXZY |
Coordenadas del punto y ángulos de Euler Rx Rz Ry con rotaciones alrededor de los ejes móviles |
6 |
|
5 |
tffEulerYXZ |
Coordenadas del punto y ángulos de Euler Ry Rx Rz con rotaciones alrededor de los ejes móviles |
6 |
|
6 |
tffEulerYZX |
Coordenadas del punto y ángulos de Euler Ry Rz Rx con rotaciones alrededor de los ejes móviles |
6 |
|
7 |
tffEulerZXY |
Coordenadas del punto y ángulos de Euler Rz Rx Ry con rotaciones alrededor de los ejes móviles |
6 |
|
8 |
tffEulerZYX |
Coordenadas del punto y ángulos de Euler Rz Ry Rx con rotaciones alrededor de los ejes móviles |
6 |
|
9 |
tffEulerXYX |
Coordenadas del punto y ángulos de Euler Rx Ry Rx con rotaciones alrededor de los ejes móviles |
6 |
|
10 |
tffEulerXZX |
Coordenadas del punto y ángulos de Euler Rx Rz Rx con rotaciones alrededor de los ejes móviles |
6 |
|
11 |
tffEulerYXY |
Coordenadas del punto y ángulos de Euler Ry Rx Ry con rotaciones alrededor de los ejes móviles |
6 |
|
12 |
tffEulerYZY |
Coordenadas del punto y ángulos de Euler Ry Rz Ry con rotaciones alrededor de los ejes móviles |
6 |
|
13 |
tffEulerZXZ |
Coordenadas del punto y ángulos de Euler Rz Rx Rz con rotaciones alrededor de los ejes móviles |
6 |
|
14 |
tffEulerZYZ |
Coordenadas del punto y ángulos de Euler Rz Ry Rz con rotaciones alrededor de los ejes móviles |
6 |
|
15 |
tffFixedABC |
Coordenadas del punto y ángulos de Euler Rx Ry Rz sin rotaciones alrededor de los ejes móviles |
6 |
|
16 |
tffFixedXZY |
Coordenadas del punto y ángulos de Euler Rx Rz Ry sin rotaciones alrededor de los ejes móviles |
6 |
|
17 |
tffFixedYXZ |
Coordenadas del punto y ángulos de Euler Ry Rx Rz sin rotaciones alrededor de los ejes móviles |
6 |
|
18 |
tffFixedYZX |
Coordenadas del punto y ángulos de Euler Ry Rz Rx sin rotaciones alrededor de los ejes móviles |
6 |
|
19 |
tffFixedZXY |
Coordenadas del punto y ángulos de Euler Rz Rx Ry sin rotaciones alrededor de los ejes móviles |
6 |
|
20 |
tffFixedZYX |
Coordenadas del punto y ángulos de Euler Rz Ry Rx sin rotaciones alrededor de los ejes móviles |
6 |
|
21 |
tffFixedXYX |
Coordenadas del punto y ángulos de Euler Rx Ry Rx sin rotaciones alrededor de los ejes móviles |
6 |
|
22 |
tffFixedXZX |
Coordenadas del punto y ángulos de Euler Rx Rz Rx sin rotaciones alrededor de los ejes móviles |
6 |
|
23 |
tffFixedYXY |
Coordenadas del punto y ángulos de Euler Ry Rx Ry sin rotaciones alrededor de los ejes móviles |
6 |
|
24 |
tffFixedYZY |
Coordenadas del punto y ángulos de Euler Ry Rz Ry sin rotaciones alrededor de los ejes móviles |
6 |
|
25 |
tffFixedZXZ |
Coordenadas del punto y ángulos de Euler Rz Rx Rz sin rotaciones alrededor de los ejes móviles |
6 |
|
26 |
tffFixedZYZ |
Coordenadas del punto y ángulos de Euler Rz Ry Rz sin rotaciones alrededor de los ejes móviles |
6 |
|
27 |
tffTwoAngAB |
Coordenadas del punto y dos ángeles AB |
5 |
|
28 |
tffTwoAngAC |
Coordenadas del punto y dos ángeles AC |
5 |
|
29 |
tffTwoAngBA |
Coordenadas del punto y dos ángeles BA |
5 |
|
30 |
tffTwoAngBC |
Coordenadas del punto y dos ángeles BC |
5 |
|
31 |
tffAxisAngleRad |
Coordenadas del punto y eje-ángulo en radianes |
6 |
|
32 |
tffAxisAngleDeg |
Coordenadas del punto y eje-ángulo en grados |
6 |
-
Los ángulos se especifican en grados: Verdadero (grados)/Falso (radianos), relevante para los formatos de los párrafos 3-30.
-
Separador-Siempre un personaje.
Parámetros opcionales (transformación adicional):
-
Transformación a lo largo del eje X. X=N, donde N es valor de desplazamiento
-
Transformación a lo largo del eje Y. Y=N, donde N es valor de desplazamiento
-
Transformación a lo largo del eje Z. Z=N, donde N es valor de desplazamiento
-
Rotación a un ángulo A. A=N, donde N - valor del ángulo de rotación
-
Rotación a un ángulo B. B=N, donde N - valor del ángulo de rotación
-
Rotación a un ángulo C. C=N, donde N - valor del ángulo de rotación
Ejemplo de archivo que no contiene la línea de configuración:
;
first
0.0
00000
0.0
00000
0.0
00000
-1.0
00000
0.0
00000
0.0
00000
0.0
00000
50.0
00000
0.0
00000
0.0
00000
0.0
00000
1.0
00000
50.0
00000
50.0
00000
0.0
00000
0.0
00000
1.0
00000
0.0
00000
50.0
00000
50.0
00000
50.0
00000
1.0
00000
0.0
00000
0.0
00000
;
second
25.0
00000
0.0
00000
0.0
00000
0.0
00000
0.0
00000
1.0
00000
50.0
00000
50.0
00000
-50.0
00000
0.0
00000
1.0
00000
0.0
00000
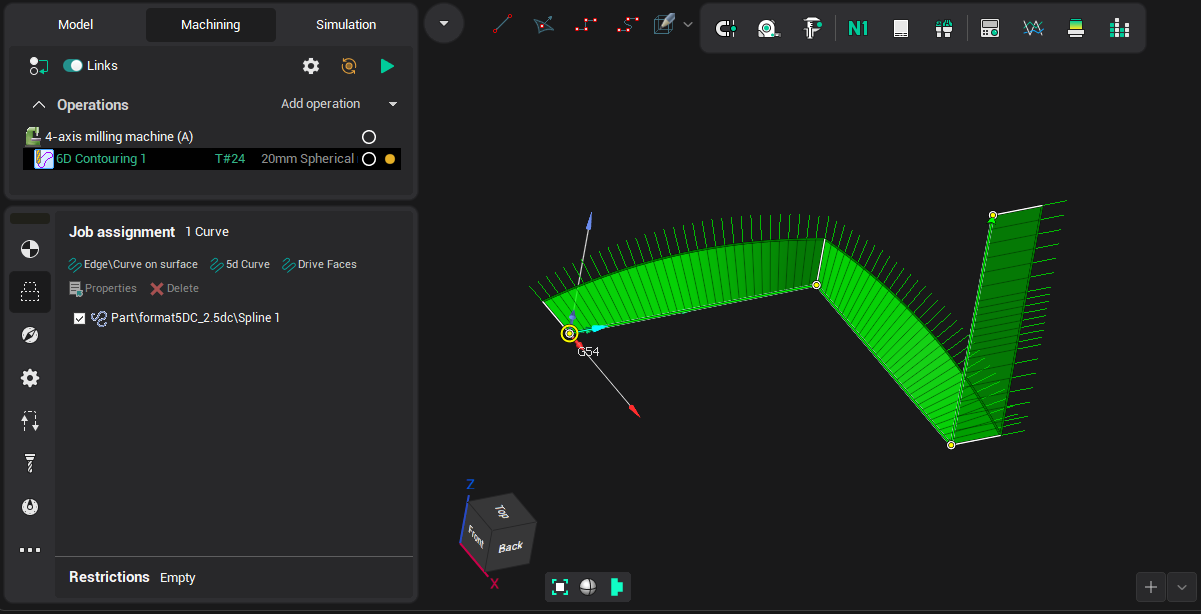
El resultado de añadir una curva en
Asignación de puestos de trabajo
por el botón
![]() en
Contorno 5D
la operación se muestra en la siguiente imagen:
en
Contorno 5D
la operación se muestra en la siguiente imagen:
Ejemplo de archivo, con la línea de configuración:
tffEulerXYZ
true
,
A
=
0.0
0
B
=
0.0
0
C
=
0.0
0
0.0
00
,
0.0
00
,
0.0
00
,
0.0
00
,
-90.0
00
,
0.0
00
0.0
00
,
50.0
00
,
0.0
00
,
0.0
00
,
0.0
00
,
90.0
00
50.0
00
,
50.0
00
,
0.0
00
,
-90.0
00
,
0
,
0.0
00
50.0
00
,
50.0
00
,
50.0
00
,
-90.0
00
,
0
,
0.0
00
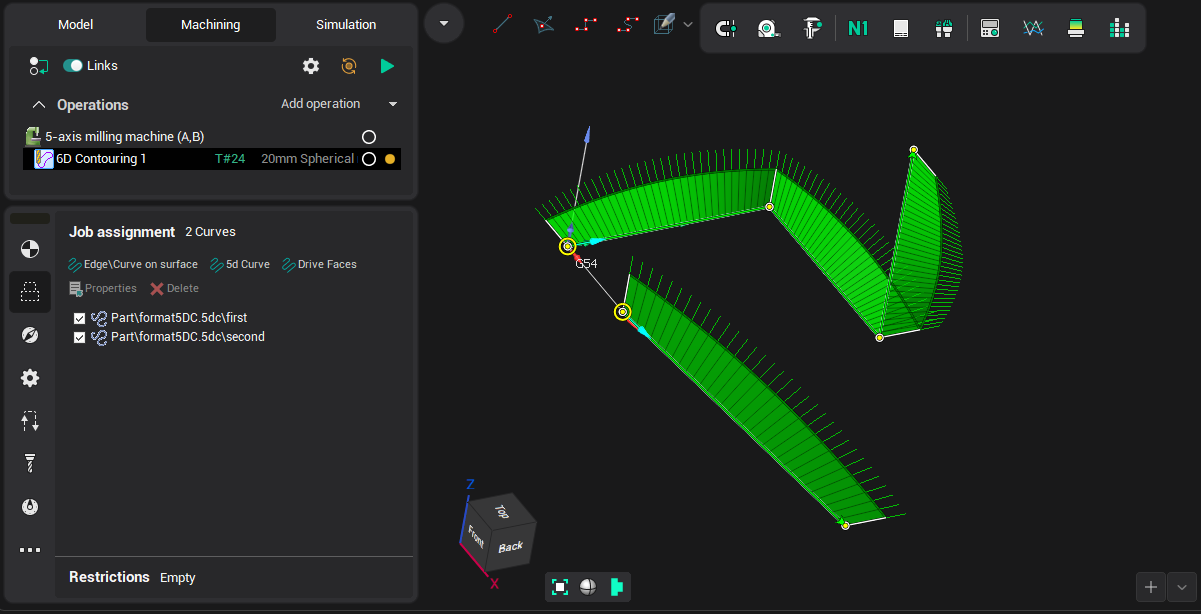
El resultado de la adición de tal curva en
Asignación de puestos de trabajo
por el botón
![]() en
Contorno 5D
la operación se muestra en la siguiente imagen:
en
Contorno 5D
la operación se muestra en la siguiente imagen: