Configuración del sistema de coordenadas de la herramienta y la pieza de trabajo
Al programar un robot es necesario definir la herramienta y los sistemas de coordenadas de la pieza de trabajo (el marco de la herramienta y el marco del usuario).
Definición del sistema de coordenadas de la herramienta
El sistema de coordenadas de la herramienta se define especificando el origen y los ángulos de rotación de la herramienta CS en relación con el sistema de coordenadas de brida del robot base, y el overhang de la herramienta.
1. Establecer la posición y la orientación de la cabeza de la herramienta para el proyecto
Como primer paso realizar la calibración del sistema de coordenadas de la herramienta en el robot real siguiendo las instrucciones del manual del robot. Asegúrese de que el eje Z positivo de la herramienta CS mira hacia abajo la dirección del voladizo de la herramienta después de la calibración.
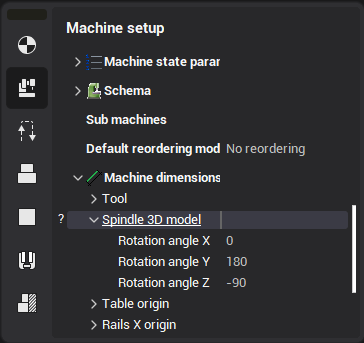
En el sistema CAM en la pestaña Tecnología seleccione el nodo robot en el árbol de trabajo y en la pestaña Configuración de la máquina en el inspector introduzca los valores que acaba de obtener después de la calibración de la herramienta CS en los campos <Máquinas dimensiones.Herramientas> (ver la primera imagen abajo). Los valores de los ángulos de rotación A, B, C (W, P, R) generalmente deben actualizarse sólo cuando se cambia la configuración del cabezal de la herramienta (el cabezal de la herramienta se modifica o se reemplaza).
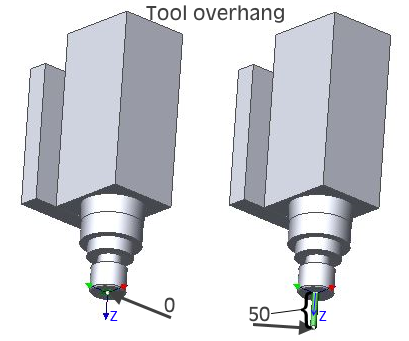
Si se utilizó una herramienta al calibrar el robot (ver la segunda imagen), introduzca la longitud de la herramienta en el campo <Tool overhang>, de lo contrario deje este campo como 0.
Los parámetros <Spindle 3D model> definen la transformación adicional del modelo 3d del cabezal de la herramienta en relación con el sistema de coordenadas de la herramienta (para visualización y simulación) y no afectan de ninguna manera a la orientación de la herramienta ni a los caminos de herramientas resultantes.
Si desea que los valores introducidos se utilicen como valores predeterminados para el robot actual en todos los proyectos nuevos, tiene que editar el archivo .xml del robot. Por ejemplo:
<X DefaultValue="134.83"/>).
2. Establecer el overhang de la herramienta para una operación
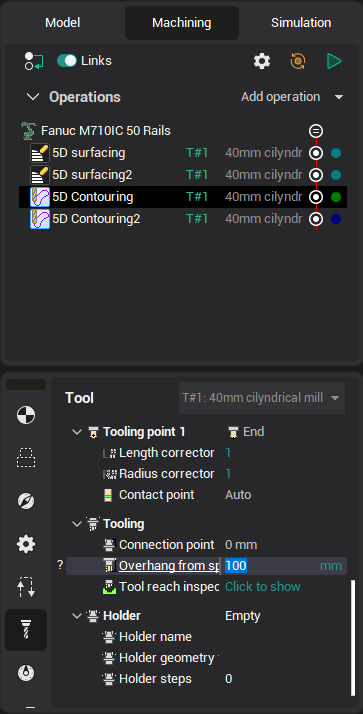
Para cada nueva herramienta que utilices en las operaciones del proyecto tienes que especificar el overhang de la herramienta. Para ello activa la pestaña <Herramienta> en el inspector de parámetros de operación y haga clic en el parámetro <Overhang> (como se muestra en la imagen de abajo). La herramienta overhang (la dimensión cal) y las tres coordenadas del punto central de la herramienta (TCP) en el sistema de coordenadas de brida de herramientas (X-rojo, Y-verde, Z-blue) se mostrarán en la vista gráfica. Puede editar las dimensiones haciendo clic en ellas e introduciendo los valores con el teclado o mediante el desplazamiento de la rueda del ratón. Todas las cuatro dimensiones están interrelacionadas, por lo que cuando una de ellas se edita, las otras se recalculan de tal manera que sólo la herramienta overhang se cambia.
en el inspector de parámetros de operación y haga clic en el parámetro <Overhang> (como se muestra en la imagen de abajo). La herramienta overhang (la dimensión cal) y las tres coordenadas del punto central de la herramienta (TCP) en el sistema de coordenadas de brida de herramientas (X-rojo, Y-verde, Z-blue) se mostrarán en la vista gráfica. Puede editar las dimensiones haciendo clic en ellas e introduciendo los valores con el teclado o mediante el desplazamiento de la rueda del ratón. Todas las cuatro dimensiones están interrelacionadas, por lo que cuando una de ellas se edita, las otras se recalculan de tal manera que sólo la herramienta overhang se cambia.
Diferentes formas de definir los sistemas de coordenadas
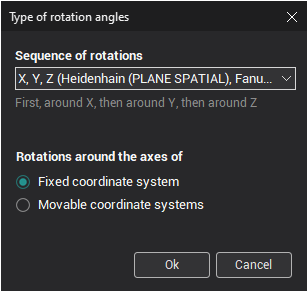
Los robots de diferentes fabricantes pueden tener diferentes formas de definir los ángulos de rotación del sistema de coordenadas. Por ejemplo, los robots Fanuc tienen el orden de las rotaciones primero alrededor del eje X, luego alrededor de Y, luego alrededor de Z, mientras que los robots KUKA tienen el orden de las rotaciones primero alrededor del eje Z, luego alrededor de Y, luego alrededor de X.
En el sistema CAM el orden correcto de las rotaciones para el robot específico se utiliza por defecto, pero si desea utilizar un esquema de rotación no estándar para definir un sistema de coordenadas siempre puede hacerlo seleccionando el esquema de rotación en la ventana <Tipo de ángulos de rotación> que está disponible en la <Definición de nuevo sistema de coordenadas>, <Transformaciones espaciales> y <Configuración de piezas> diálogos pulsando el botón correspondiente.
Definición del sistema de coordenadas del usuario de la pieza de trabajo
Aquí está la forma recomendada.
1) En el robot real definir el nuevo sistema de coordenadas de usuario especificando tres puntos en la pieza de trabajo (la mayoría de los robots soportan esta forma de definir un sistema de coordenadas). El primer punto es el origen CS, el segundo y el tercer punto especifican las direcciones de los ejes X e Y. Como resultado obtendrá el id (el número) del sistema de coordenadas y los parámetros del sistema de coordenadas XYZ ABC (WPR, RxRyRz, q1q2q3q4 ).
2) En el sistema CAM crear un nuevo sistema de coordenadas utilizando exactamente el mismo enfoque utilizado en el robot real:
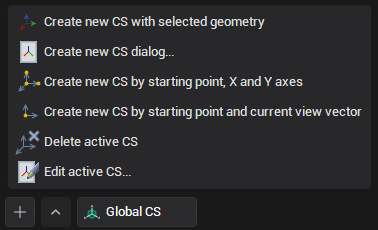
Cree un nuevo sistema de coordenadas seleccionando el comando <Creation of CS, configurando el punto de inicio CS y la dirección de los ejes X e Y> y haga clic en los tres puntos del modelo de la pieza de trabajo que acaba de utilizar al definir el sistema de coordenadas del usuario en el robot real.
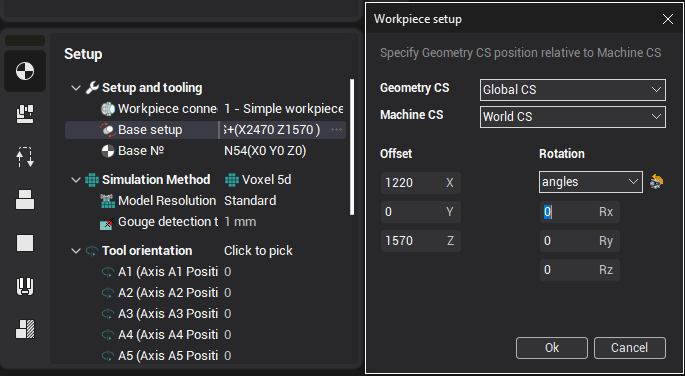
En el cuadro de diálogo <Configuración de piezas> seleccione el sistema de coordenadas de nueva creación como el <CS geométrico>. En las casillas para la Traducción y la Rotación introduzca los valores XYZ ABC (WPR, RxRyRz, q1, q2, q3, q4) obtenidos en el robot.
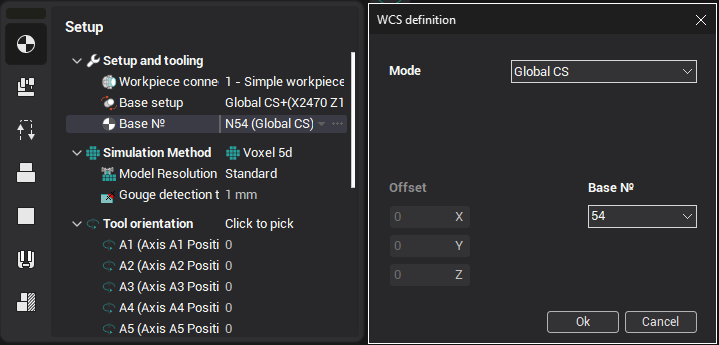
En el diálogo <Workpiece CS> seleccione el sistema de coordenadas creado recientemente para el <Mode (forma de asignación):>. Introduzca el número del sistema de coordenadas que se utilizará en el programa en el cuadro <LCS number> (Default es 54, porque es el sistema de coordenadas estándar de la mayoría de las máquinas).
Después de eso, la posición de la pieza de trabajo y los accesorios en el sistema CAM tienen que reflejar la posición de la pieza de trabajo real en relación con el robot real.
Se recomienda configurar el sistema de coordenadas de la pieza de trabajo del usuario en la raíz del árbol de trabajo (el primer elemento con el icono del robot y el título en el árbol) en lugar de en las operaciones.
3) La posición del sistema de coordenadas del usuario se puede guardar en el archivo robot .xml como valor predeterminado para los nuevos proyectos. Simplificará el uso posterior del sistema CAM ya que los modelos de piezas recién importados se colocarán en posiciones más predecibles en relación con el robot.