Programación del sexto eje del robot
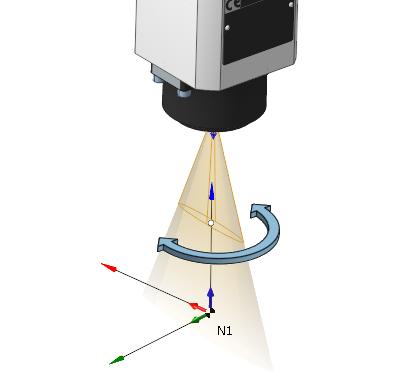
Para posicionar una herramienta giratoria en relación con la pieza de trabajo, basta con cinco grados de libertad, pero la mayoría de los robots tienen 6 grados de libertad. El último sexto DOF está representado por una junta adicional en la brida de la herramienta y se utiliza para ampliar la flexibilidad del robot y la zona de alcance (fijando la posición y orientación de la herramienta y cambiando el ángulo de la sexta articulación se están moviendo las otras articulaciones del robot, y esto ayuda a evitar varios tipos de colisiones cinemáticas y mecánicas durante el mecanizado).
En el sistema CAM hay dos formas de programar el sexto eje:
automática,
manual.
Puedes controlarlo en el inspector de propiedades de la operación.
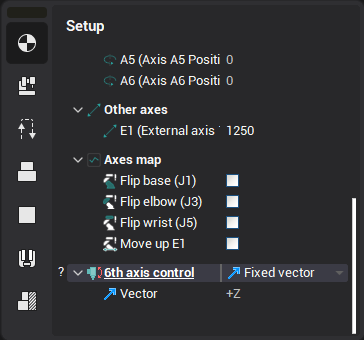
Los de forma automática está representado por los pocos modos de la Control del sexto eje propiedad.
< vector fijo>,
<Directo al punto>
<Ruta de herramientas>.
Modo de control del sexto eje del vector fijo
En este modo se define el eje (el vector 3d) a lo largo del cual se alinea el eje Z de la brida de herramientas del robot (el vector de brida de herramientas).
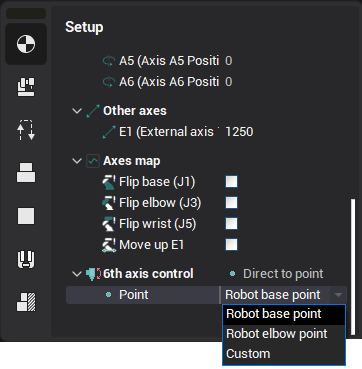
Modo de control directo al punto 6 del eje
En este modo se especifica un punto 3d al que se dirige el vector de brida de la herramienta del robot durante el mecanizado.
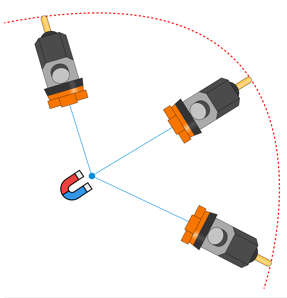
El punto puede ser cualquiera de los dos
el punto base del robot, o
el punto del codo del robot,
o un punto personalizado.
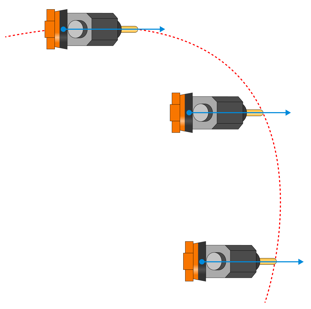
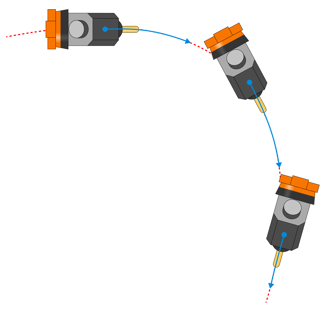
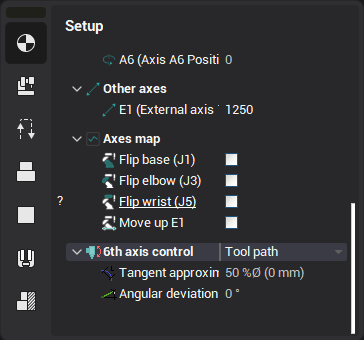
Modo de control del sexto eje de la vía de herramientas
En este modo un eje de TCP está alineado con la dirección tangente toolpath.
Opcionalmente también puede definir el Tolerancia de aproximación tangente y el desviación angular constante relativa a la tangente del camino de herramientas en cada punto.
Los forma manual de programación el sexto eje es mediante el uso de la Mapa de hachas de robot (también conocido como el Optimizador de Ejes Extra Robot). Es posible combinar ambos enfoques: utilizar la ley automática para la mayor parte de la ruta de herramientas y aplicar correcciones adicionales al control del sexto eje en el Mapa de Ejes Robot.