Mecanizado en robots industriales
El sistema CAM se puede utilizar para programar robots industriales (articulados) para cortar, fresar, pintar, soldar y otras aplicaciones. El proceso de programación de un robot industrial es básicamente el mismo que el de un robot convencional. fresador, excepto que el robot suele tener 6 grados de libertad (frente a 5 grados de libertad necesarios para colocar un cortador en relación con una pieza de trabajo) más grados opcionalmente adicionales de libertad de varios tipos de posicionadores de piezas (como mesas rotativas) y posicionadores de robots (como raíles). Por lo tanto, cuando se utiliza con un robot las operaciones del sistema CAM ofrecen un conjunto adicional de parámetros para controlar esos grados excesivos de libertad (DOFs).
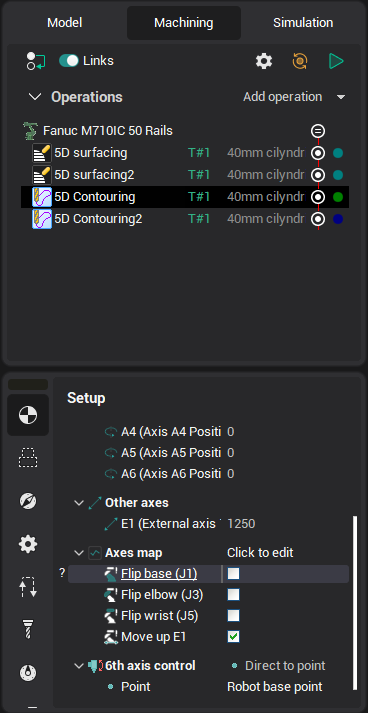
Además de los excesivos grados de libertad, un robot puede alcanzar la posición deseada de la herramienta en relación con la pieza de trabajo en varios estados diferentes. El estado que se utilizará en la operación se puede especificar en las casillas de verificación Operación Configuración con la base <flip>, <flip code>, <flip muñeque> también.
En este capítulo se tratan las siguientes características de programación de robots:
Configuración del sistema de coordenadas de la herramienta y la pieza de trabajo
Programación del sexto eje del robot
Programación de la posición de los carriles
Programación de la mesa rotativa
Evitar las zonas y singularidades fuera de alcance
Transiciones del robot de programación (método obsoleto)
La función está disponible en la siguiente Configuración del sistema CAM:
Robots
Maestro
Pro