Métodos de desplome de las operaciones de laminado
Cuando es imposible acercarse al área de mecanizado desde el exterior, el sistema genera automáticamente un movimiento de inmersión hasta el primer punto de la Pase de trabajo. Una inmersión es una sección del camino de herramientas a lo largo del eje Z dentro del cuerpo de la pieza de trabajo.Plunge> se realiza de la siguiente manera:
Acercamiento de la herramienta al punto de inmersión XY en el avión seguro de la operación.
El nivel de seguridad es el nivel superior Z del sistema de coordenadas actual. La distancia segura es la distancia hasta el inicio de la inmersión definida. El nivel de seguridad es el nivel superior Z del sistema de coordenadas actual. La distancia segura es la distancia hasta el inicio de la inmersión definida.
El descenso vertical en la aproximación se alimenta en el comienzo de la inmersión definida.
El método de inmersión seleccionado se aplica en la entrada de aproximación al punto de aproximación.
Comienza el acercamiento.
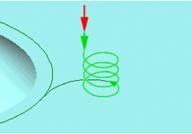
Los siguientes métodos de inmersión están disponibles en el sistema:
<Axial>. Realizado a lo largo de la vertical directamente al primer punto de aproximación.
<Zigzag>. La herramienta realiza movimientos recíprocos a lo largo de una sección recta, conectada al primer punto de aproximación. La longitud de la sección es una opción definida por el usuario.
<Spiral>. La herramienta realiza un movimiento helicoidal a lo largo de un círculo, conectado en su último punto con el primer punto de aproximación. El radio del círculo es una opción definida por el usuario.
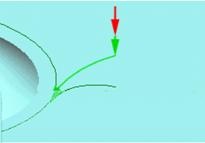
< Curva de aproximación larga>. La herramienta se hunde a lo largo de la curva de aproximación. El movimiento de inmersión se completa al final del movimiento de aproximación.
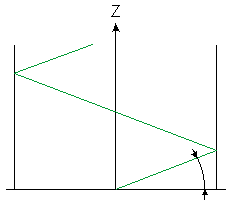
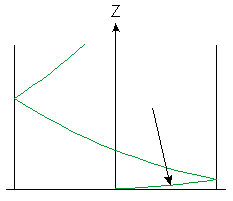
Para los tres últimos tipos de inmersión (<Zigzag>, <Por espiral> y < Curva de aproximación larga>) el sistema aplica la regla de movimiento Z seleccionada. Hay dos tipos de movimiento disponibles: <Angular> y <Radial>:
<Angular>. La velocidad del movimiento vertical de la herramienta es constante. El parámetro se define como el ángulo entre el plano XY y el plano vertical de la herramienta (Z).
<Radial>. El movimiento vertical de la herramienta se realiza de acuerdo con la regla sinusoidal, donde la velocidad de variación de profundidad en el último punto es igual a cero. El parámetro se define por un radio de arco, cuyo centro se encuentra paralelo al eje Z desde el punto de partida del camino de la herramienta.
Puede definir más de un tipo de inmersión para una operación estableciendo el campo de comprobación para este tipo de inmersión. En este caso, puede organizar los tipos preferidos manualmente usando el botón

 . Tipo de inmersión superior en la lista es más preferido para el sistema.
. Tipo de inmersión superior en la lista es más preferido para el sistema.
Véase también:
Métodos de aproximación, retracción y inmersión