Programación de la posición de los carriles
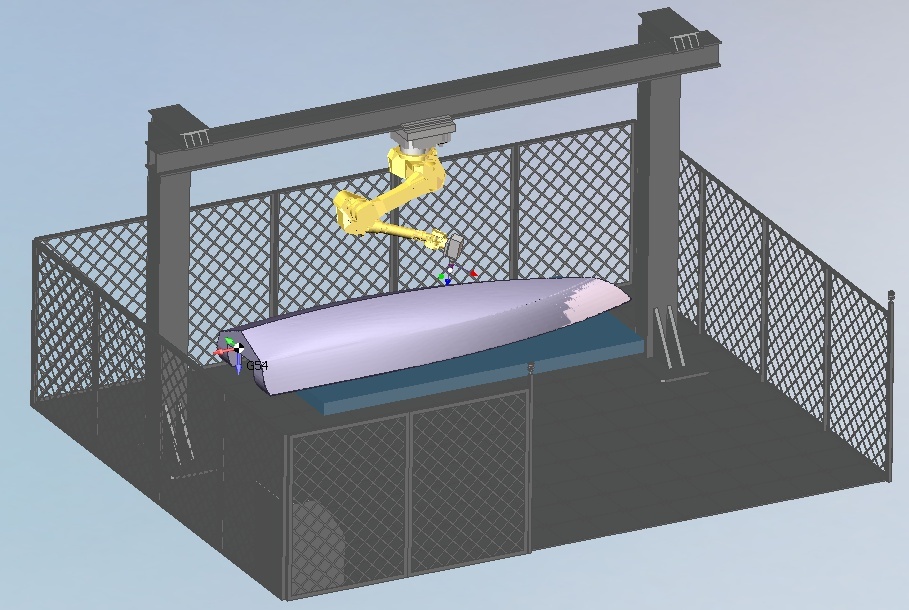
A menudo para aumentar la zona de alcance de un robot industrial, el robot se monta en raíles. El sistema CAM permite el control simultáneo de hasta 3 posicionadores ferroviarios.
Si el esquema cinemático de una célula robótica contiene un carril o varios carriles, los parámetros siguientes están disponibles para cada carril en los parámetros de operación.
1. La posición inicial del ferrocarril para la operación (E1 (posición del eje externo 1) en la imagen).
2. La casilla de verificación Mover hacia arriba del eje del carril (Mover hacia arriba la casilla de verificación E1 en la imagen)
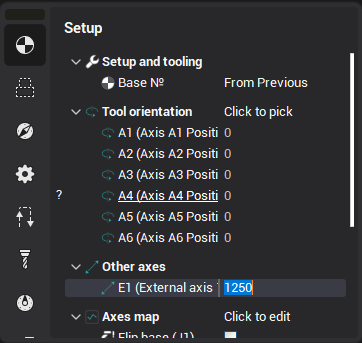
Subir <el eje del carril>
Si este modo está activado, el robot se mueve automáticamente sobre el carril durante el mecanizado de tal manera que el punto de programación actual del centro de herramientas aparezca bajo el punto cero de la base del robot (o lo más cercano posible).
¡Atención!
Tener el punto central de la herramienta justo debajo del punto cero de la base del robot no siempre es óptimo. Esta posición puede conducir a singularidades de la primera junta. En este caso es necesario ajustar la posición del riel en el mapa de hachas del robot (añadiendo un cambio adicional).