Pick-and-place
Ruta y parámetros de la herramienta
"Pick and place" operación está diseñada para controlar la herramienta de agarre para mover la pieza de trabajo dentro de la zona de trabajo de una máquina.
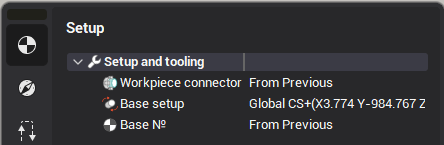
La pieza de trabajo se mueve del lugar, que se definió en la operación anterior al nuevo lugar, que se define por Conector de pieza de trabajo y Configuración de la pieza de trabajo. Todos los movimientos de la pinza se generan en el definido sistema de coordenadas de pieza de trabajo.
La ruta de la herramienta de la operación de pick y place tiene 3 secciones principales: pick, place, return.
Sección de selección contiene el movimiento de una pinza desde la posición inicial de la herramienta (generalmente punto de cambio de la herramienta) hasta la posición de selección de la pieza. La posición de selección se define en el sistema de coordenadas de geometría con offsets adicionales.
Sección «Lugar» tiene los movimientos de agarre con la pieza de trabajo desde la posición inicial hasta la nueva. Se puede ejecutar a través de la superficie segura o con la opción de evitar colisiones habilitada.
Sección de devolución es los movimientos de la pinza vacía desde la posición del lugar hasta la final (generalmente el punto de cambio de la herramienta).
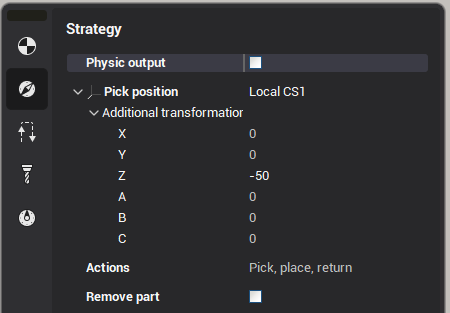
Medidas adoptadas el parámetro define las secciones que deben ser generadas. Si la opción eliminar parte se activa entonces la pieza desaparece después de la colocación.
Añadiendo participación/retracción
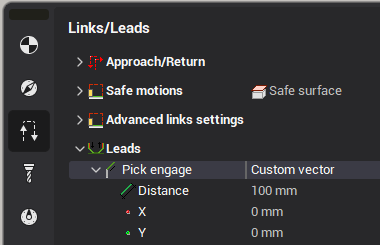
Usando estos parámetros puede definir la longitud y la dirección de los movimientos de engage/retracte a las posiciones de selección y/o de lugar. Consideremos el "engage pick". Este parámetro define la posición desde la cual la herramienta engage (usando la fuente especial "engage") se hace para elegir la parte. Hay tres tipos de engage:
Ninguno - Engage está desactivada.
Auto - Engage se realiza a lo largo del eje de la herramienta
Vector personalizado - Engage se realiza a lo largo de la dirección personalizada
El "Distancia" el parámetro define la longitud del movimiento de la herramienta a lo largo de la dirección seleccionada (el movimiento se realiza utilizando la alimentación de enganche).
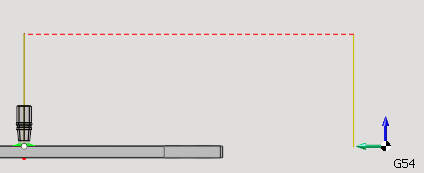
En la captura de pantalla anterior hay un ejemplo de trayectoria Pick and Place donde los segmentos verticales corresponden al engage/retract (tienen la misma longitud en este ejemplo). El color rojo indica alimentación rápida, el color oliva - engage/retract feed.
Crear un tutorial de proyecto de Pick and Place
El siguiente video muestra cómo realizar los proyectos de montaje.
Operación "Lugar a la siguiente etapa"
Este es el tipo especial de la operación de pick and place, que, como el "Turn toma el control", toma la posición para colocar la parte de la siguiente operación (generalmente es la Fase de configuración o Parte grupo). El resto de los parámetros son los mismos que en la operación general de pick-and-place.
El uso principal de esta operación es para los robots y máquinas de fresado. Para el mecanizado de torneado o fresado se recomienda utilizar el especializado "Date la vuelta." la operación en su lugar.
Ejemplo de proyecto(s)
Los siguientes proyectos de muestra contienen varios ejemplos de Pick and Place: "Moldeo/WoodWorking/FrameAssembly.stcp" y los proyectos del "Robots/Pick y lugar" carpeta.
Véase también:
Operaciones de traslado de piezas
Requisitos de la máquina para las operaciones de movimiento en pieza
Control de dispositivos de sujeción