Pick-and-Place
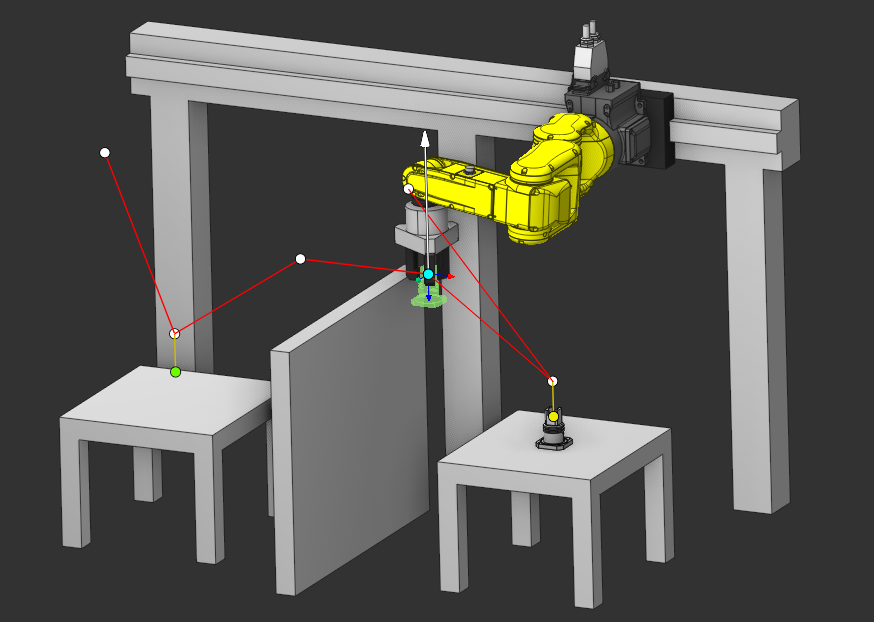
Se basa en el Pick-and-place operación.
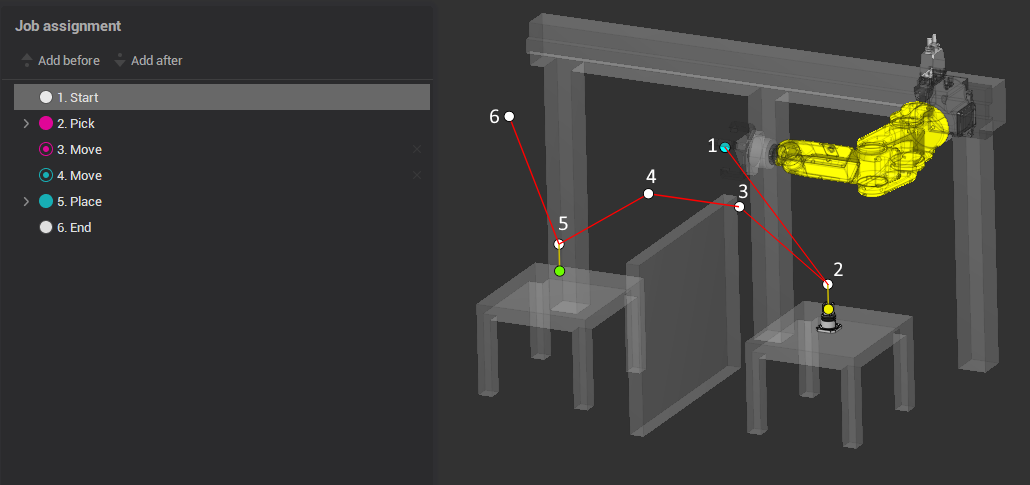
Los asignación de tareas ![]() se construye en puntos nodales. En los puntos, se establece una posición para mover la máquina. Al añadir y eliminar puntos, se puede establecer el movimiento deseado de la pieza.
se construye en puntos nodales. En los puntos, se establece una posición para mover la máquina. Al añadir y eliminar puntos, se puede establecer el movimiento deseado de la pieza.
A asignación de tareas consta de varios tipos de puntos:
 Punto de inicio
Punto de inicio Punto de selección
Punto de selección Mover el punto (relativo al punto de selección)
Mover el punto (relativo al punto de selección) Mover el punto (relativo al punto de posición)
Mover el punto (relativo al punto de posición) Punto de emplazamiento
Punto de emplazamiento Punto final
Punto finalEstos puntos se pueden utilizar para construir una cadena de trayectorias.
-
Punto de inicio
Es de sólo lectura. Este es el punto final de la operación anterior -
Punto de selección
La posición de agarre de la pieza.
Propiedades: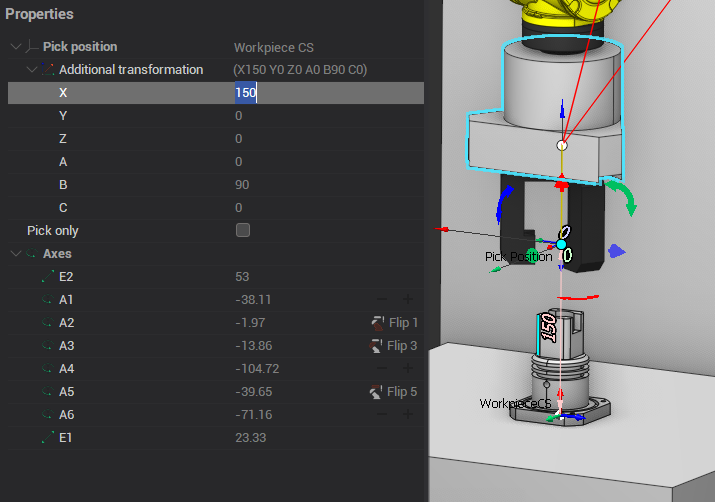
La posición de selección se define en el sistema de coordenadas de geometría con transformaciones adicionales.
si Elija sólo se selecciona, la trayectoria se detiene en este punto. Hachas... eje de la máquina en el punto actual.
Hachas... eje de la máquina en el punto actual.Al cambiar de ejes, aparecen dos botones:
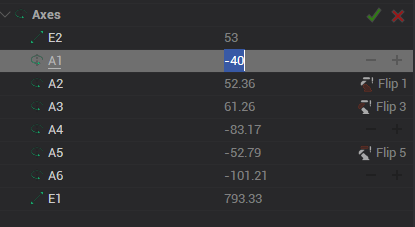
 - mueve el punto a la punta de la máquina
- mueve el punto a la punta de la máquina - devuelve valores anteriores
- devuelve valores anteriores
 - 360/+360
- 360/+360 Flip - controla los giros en el robot
Flip - controla los giros en el robot -
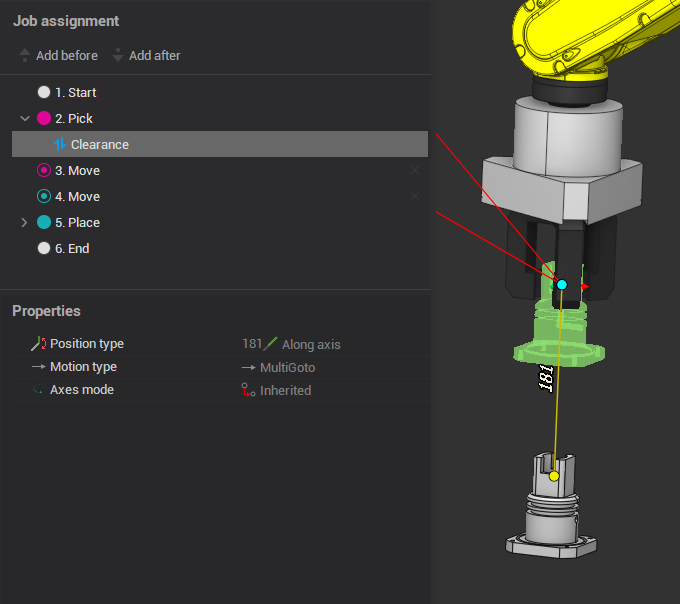
Mover el punto (relativo al punto de selección)
La página tiene botones “Añadir posición antes” y “Añadir posición después” para añadir puntos intermedios. Por defecto, los puntos se agregan en relación con el seleccionado.
si cambia la posición inicial de la pieza, entonces por defecto este punto también se moverá.
Propiedades: Arreglar vX - activar el modo de edición de 6 ejes:
Arreglar vX - activar el modo de edición de 6 ejes: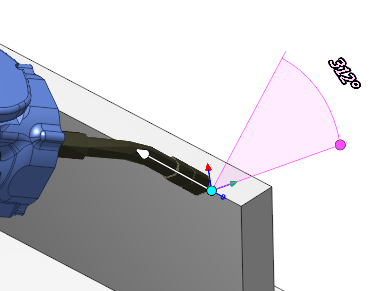
 Tipo de movimiento - está establecido por qué tipo de movimiento al punto:
Tipo de movimiento - está establecido por qué tipo de movimiento al punto:MultiGoto - Movimiento de coordenadas múltiples

PhysicGoto - Movimiento de ejes de máquinas físicas

Evitar colisiones - Movimiento de evitación de colisiones
-
Mover el punto (relativo al punto de posición)
Difiere del punto anterior en que el punto se mueve con la posición final de la parte. -
Punto de emplazamiento
Posición donde debe colocarse la pieza.
La posición en la que debe colocarse la pieza está definida por el Conector de la pieza de trabajo y Configuración de la pieza de trabajo. Todos los movimientos de la pinza se generan en el definido sistema de coordenadas de pieza de trabajo.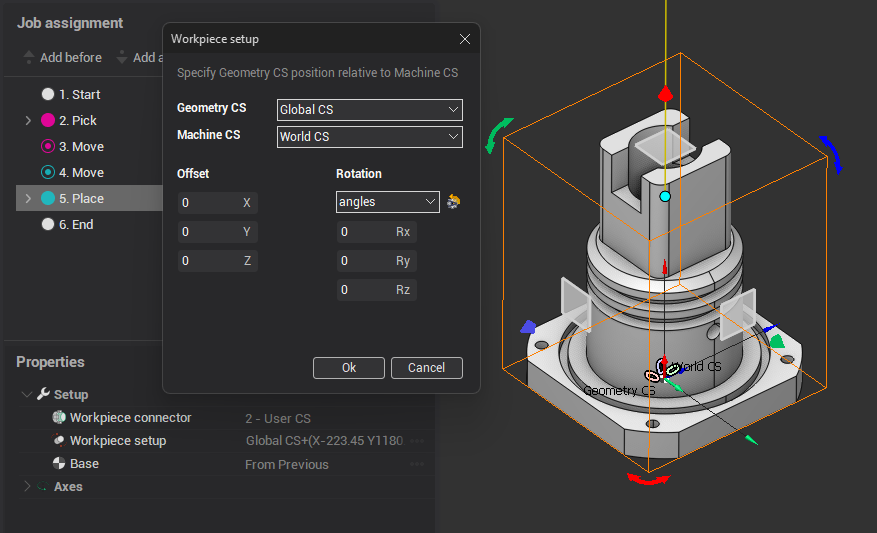
-
Punto final
Esto es un retorno al punto de cambio de la herramienta. Si está apagado, entonces la trayectoria termina en un punto de lugar.
Punto de limpieza
Utilizando estos puntos se puede definir la longitud y la dirección para los movimientos de engage/retracte a las posiciones de selección y/o lugar.
Cómo arrastrar puntos en interactivo se puede encontrar en Operación de soldadura de puntos
Véase también:
Operaciones de traslado de piezas
Requisitos de la máquina para las operaciones de movimiento en pieza
Control de dispositivos de sujeción