Cambio de posición de la herramienta
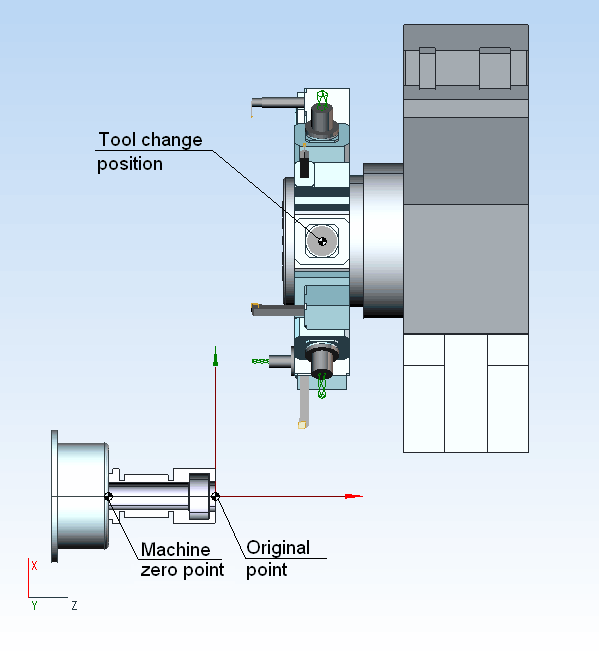
La posición de cambio de herramienta es la posición de la máquina en la que se realiza el cambio de herramienta. En el sistema CAM puede especificar una posición de cambio de herramienta predeterminada para toda una lista de tareas y anular esta configuración en operaciones individuales según lo necesite.
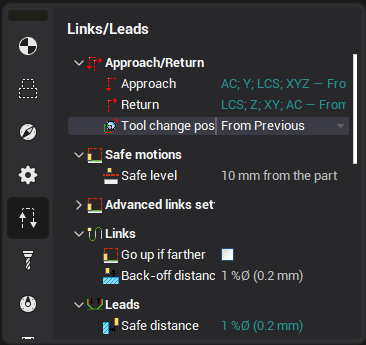
La posición de cambio de la herramienta se especifica en la sección Acercamiento/Retorno en el panel de configuración de la operación.
Definir una posición de cambio de herramienta no es obligatorio. Si no define una posición de cambio de herramienta, entonces en el modo de simulación no se simula el cambio de herramienta. Una herramienta sólo aparece al principio de una operación real y desaparece al final de una operación. Este ajuste se utiliza generalmente para la fresado convencional de 3 ejes cuando no hay riesgo de dañar una máquina o una pieza mientras que la herramienta se intercambia. Sin embargo, para máquinas complejas como centros de fresado de cinco ejes y máquinas de giro de fresador especificar una posición de cambio de herramienta válida es crucial para el mecanizado seguro y eficiente en el tiempo.
Una posición de cambio de herramienta se define como un conjunto de coordenadas de la máquina (por ejemplo, en la imagen X1(0) Y1(0) Z1(0)...) en el sistema de coordenadas de la máquina (G53). Esas coordenadas son las coordenadas físicas, no las coordenadas de la punta de la herramienta en el sistema de coordenadas de la pieza de trabajo.
Para una operación real puede seleccionar una posición de cambio de herramienta de la lista de las siguientes opciones
1. De la operación anterior - la posición de cambio de la herramienta se hereda de la operación anterior.
2. De la máquina - la posición de cambio de la herramienta se hereda de la posición especificada bajo el nodo de la máquina.
3. Personalizado. Si selecciona este elemento, aparecerá un diálogo de cambio de posición de la herramienta.
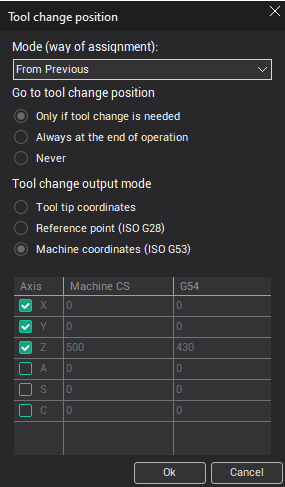
El diálogo de cambio de posición de la herramienta se utiliza para definir una posición de cambio de herramienta, así como el comportamiento de cambio de herramienta para una operación real en un modo interactivo.
1. Modo (forma de asignación) (De la máquina, De la operación anterior y Personalizado).
2. Uso de la posición de cambio de herramienta.
-
Auto (ir a la posición para el cambio de herramienta). Si se selecciona esta opción, la posición de cambio de herramienta se utiliza sólo cuando dos operaciones vecinas utilizan diferentes herramientas con diferentes números de herramienta. Si dos operaciones vecinas utilizan la misma herramienta, entonces no se genera código NC para el cambio de herramienta, la segunda operación simplemente comienza el mecanizado en el último punto de la operación anterior. Este es el comportamiento predeterminado.
-
Usar de todos modos. Cuando se selecciona la opción, una herramienta va incondicionalmente a la posición de cambio de herramienta al final de la operación.
-
No utilizar. La herramienta no va a la posición de cambio de la herramienta al final del mecanizado.
3. Modo de salida de cambio de herramienta.
-
Coordenadas de punta de herramienta. El sistema CAM genera los movimientos de cambio de herramienta usando comandos regulares GOTO y MULTIGOTO, representando las coordenadas de la punta de herramienta en el sistema de coordenadas de pieza de trabajo.
-
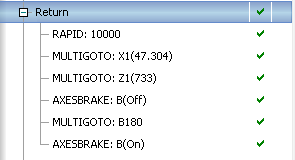
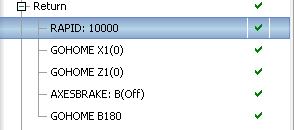
Punto de referencia (ISO G28). Cuando se selecciona la opción obliga al sistema CAM a generar los comandos GOHOME para el posicionamiento del cambio de herramienta. Los comandos GOHOME representan coordenadas en el sistema de coordenadas de la máquina y se pueden utilizar en el postprocesador para generar comandos "Ir al punto de referencia" (ISO G28).
-
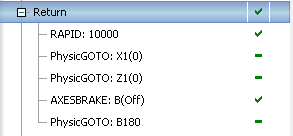
Coordenadas de la máquina (ISO G53). Cuando se selecciona la opción obliga al sistema CAM a generar los comandos PhysicGOTO para el posicionamiento del cambio de herramienta. Los comandos PhysicGOTO representan coordenadas en el sistema de coordenadas de la máquina y se pueden utilizar en el postprocesador para generar comandos "Ir a la coordenada de la máquina" (ISO G53).
4. Coordenadas de la posición de cambio de la herramienta.
Las coordenadas se especifican en la lista. Para definir una posición de cambio de herramienta debe marcar las casillas cercanas a los ejes apropiados y establecer los valores de los ejes. Puede establecer las coordenadas de los ejes tanto en el sistema de coordenadas de la máquina (G53) como en la pieza de trabajo (G54). El resultado se muestra en la pantalla. Una forma conveniente de definir una posición de cambio de herramienta es utilizar la rueda del ratón para cambiar las coordenadas de ejes mientras se mira el resultado en la vista gráfica.
La posición predeterminada del cambio de herramienta se puede especificar en el panel de parámetros de la máquina
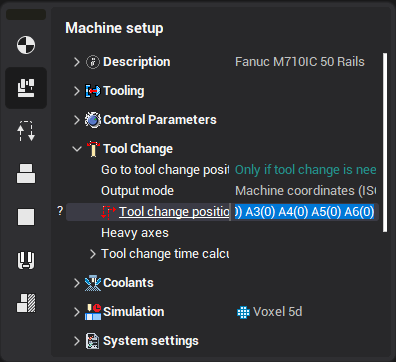
y en un archivo de configuración de máquina bajo la etiqueta <ToolChangeMachineState> .
<SCType ID="TMyMachine" type="AbstractMachine" Habilitado="true">
<SimulateToolChange DefaultValue="true"/>
<ToolChangeMachineState DefaultValue="X1(0) Y1(0) Z1(0) B180 A0 X2(0) Z2(0)"/>
</SCType>
Véase también:
Configuración de las operaciones
El punto de intercambio de herramientas