Mapa de ejes para máquinas de 5 ejes
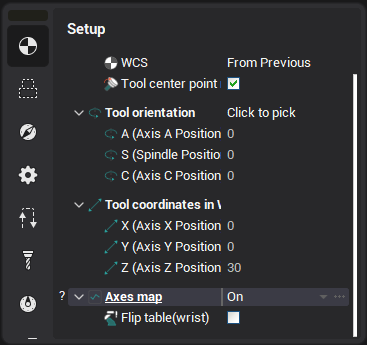
La función Axes Map se puede utilizar para optimizar la trayectoria de operación de las máquinas de 5 ejes, de manera similar a robot optimizador de ejes adicionales. Esta característica está deshabilitada por defecto, para que pueda utilizar el "Mapa de hachas" combobox en el <Configuración> ficha inspector. Para abrir la ventana especial para la optimización del camino de herramientas, utilice el botón elipsis situado a la derecha del combobox. Actualmente, hay dos tipos de mapa de ejes disponibles para el mecanizado de 5 ejes: el mapa del eje C y los mapas para ángulos de plomo/lean.
Mapa "Axis C"
El eje rotativo de la máquina, que es responsable de girar alrededor del eje Z de la herramienta, a menudo se nombra con el "C" carta (y complementaria es la A o B eje). La trayectoria de 5 ejes define la orientación de la herramienta a lo largo de sí misma y por defecto se seleccionan los valores óptimos para que los ejes rotativos de la máquina alcancen la orientación de la herramienta especificada en cada punto del camino. Sin embargo, en algunos casos puede conducir a trayectorias indeseables con obstáculos. colisiones o picos abruptos incontrolables en el movimiento de ejes rotativos debido a singularidades. Con esta característica, el axial mapa spline se puede utilizar para especificar directamente el valor de uno de los ejes rotativos a lo largo del camino de herramientas. El valor del eje secundario se selecciona automáticamente para minimizar la desviación de la herramienta definida por el usuario normal. Mapa de ejes robot página de documentación, a continuación se muestra la información sobre las características especiales de edición del eje C.
Mapa de desviación
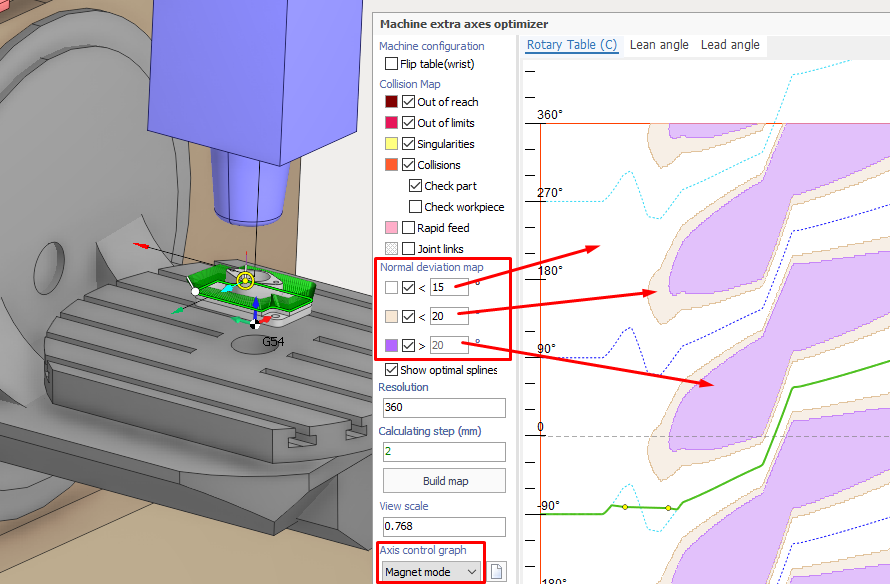
Cuando se selecciona la pestaña Mapa del eje C, la parte principal de la ventana muestra el mapa de color 2D que muestra la desviación mínima posible de la herramienta normal de la óptima (especificada en la asignación de tareas) para cada posible valor del eje C (eje vertical) y cada punto de ruta de herramientas (este es el eje horizontal). Las zonas con el mismo color tienen la desviación mínima dentro del mismo rango especificado. Los rangos se pueden personalizar con el "Mapa de desviación normal" panel a la izquierda. El mapa también puede contener zonas con las colisiones de obstáculos.
Espines óptimos
Los saltos punteados en este mapa (que no se pueden editar) corresponden al caso cuando el eje C valor es óptimo en cada punto del camino de herramientas. Esos valores óptimos no son únicos, difieren por el cambio de 360 descensos o corresponden al valor fijo diferente de la "Voltear la mesa" parámetro. La visibilidad de los splines óptimos se puede activar/desactivar con la casilla de verificación debajo del panel "Desviación del mapa normal".
Modos de edición de spline
Existen tres modos para la edición del eje C spline. Los dos primeros modos son los mismos que en el mapa de ejes robot. En cada modo la trayectoria está definida por los puntos de control personalizados. Utilice doble clic para crear un nuevo punto de control y arrástrelo para ajustar la posición.
Modo spline - la trayectoria del eje se define por la línea suave que pasa a través de los puntos especificados.
Modo polilínea - lo mismo que antes, pero los puntos de control están conectados con los segmentos rectos.
Modo magnético - la trayectoria del eje también se define por los puntos de control, pero entre ellos se genera por algoritmo especial. El objetivo es lograr la trayectoria que es la menos diferente de los splines óptimos. Consideremos los dos puntos consecutivos.
Si están más cerca el uno del otro que cualquiera de los splines óptimos están conectados con el segmento de línea recta.
Si se encuentran cerca de la misma spline óptima, primero se conectan suavemente a esta spline y entre esos puntos de conexión la trayectoria coincide con la óptima. Si algún punto está muy cerca de la spline óptima, no está conectado a ella, sino que "define" que spline óptimo para utilizar en su vecindad.
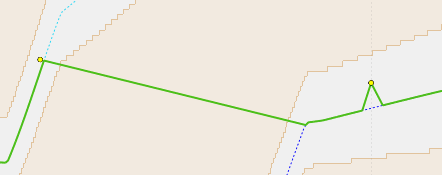
Si los puntos están cerca de diferentes splines óptimos, entonces el algoritmo busca los puntos más cercanos entre los dos splines y los conecta con la línea recta. Entonces el primer punto está conectado con el punto encontrado más cercano a la izquierda, y el segundo - con el más cercano a la derecha (ya que corresponden a los mismos splines óptimos). A continuación está el ejemplo de trayectoria del eje para el tercer caso descrito.
Mapa del ángulo plomo/leano
El ángulo Plomo/Lean son los parámetros importantes en el mecanizado de 5 ejes que definen la inclinación de la herramienta a lo largo del camino de herramientas y al lado (en el plano perpendicular) del camino de herramientas, respectivamente. Cambie a la pestaña de ángulo Plomo o Lean para controlar los valores de estos parámetros a lo largo del camino de herramientas de operación. robot optimizador de ejes adicionales.
Véase también: