Mapa de ejes robot
El mapa de hachas Robot permite definir leyes de control automáticas manuales y afinadas para los excesivos grados de libertad de un robot (el sexto eje, los ejes de raíles, los ejes de mesa rotativa). La función está disponible en la configuración de operación pulsando el botón de elipsis junto al parámetro mapa de ejes Robot.
La función está disponible en el siguiente sistema CAM configuraciones:
Robots
Maestro
Pro
Observación: necesidad adicional "Robots avanzados" licencia de módulo.
Configuración del robot
Primero hay que elegir la configuración/estado del robot que se utilizará en la operación. Es la misma configuración/estado que se puede editar en la configuración de operación bajo el parámetro Robot Axes Map. La configuración del robot está definida por los "Flips" - las posiciones alternativas de las articulaciones del robot (base, codo, muñeca) que permiten la misma posición de la herramienta en relación con la pieza de trabajo - y los modos de posicionamiento de ejes excesivos como raíles y mesas rotativas (Move Up E1, Rotate E2).
Eje optimizado
En el combobox de Eje Optimizado, seleccione el eje para el que define la ley de control en este momento.
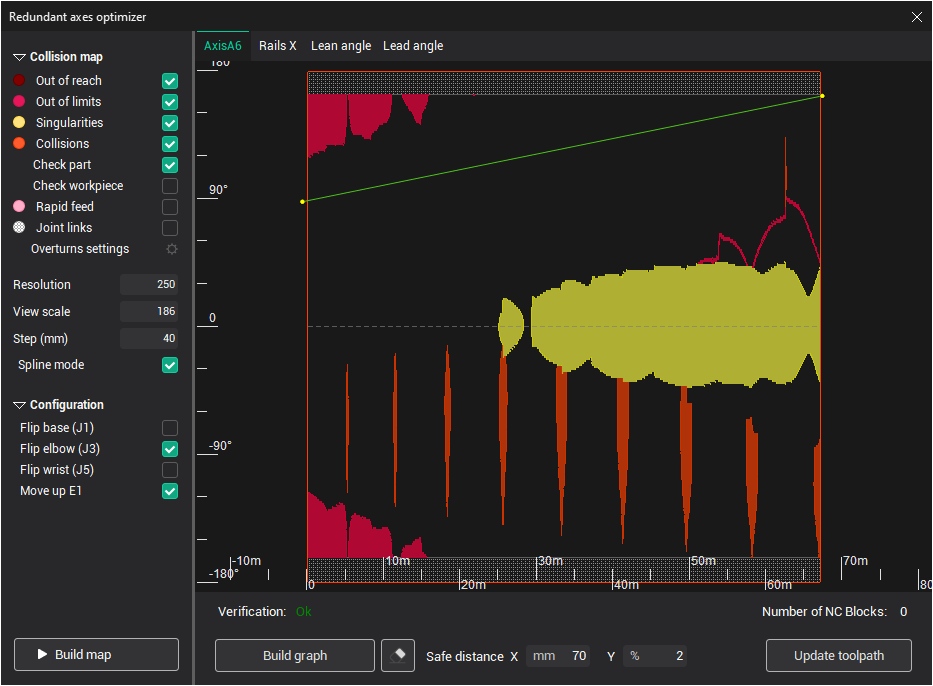
Mapa de colisión
El mapa de colisión es la representación visual de las zonas de colisión en el camino de herramientas. A lo largo del eje X es la posición de la herramienta en el camino de herramientas desde el principio medida por longitud. A lo largo del eje Y es el valor del eje optimizado. Se detectan los siguientes tipos de colisiones.
Las zonas fuera de alcance (maroon) son zonas a las que el robot no puede llegar.
Las zonas fuera de los límites (purple) son zonas a las que el robot puede llegar, pero algunos de los ejes del robot salen de sus límites definidos.
Las zonas de singularidad (amarillo) son zonas donde las articulaciones del robot se mueven a velocidades extremas.
Las zonas de colisión (naranja) son zonas donde las partes del robot chocan entre sí o con la pieza de trabajo.
La resolución del mapa se puede establecer en el cuadro Resolución como la cantidad de pasos a lo largo del eje Y a calcular.
Para construir o actualizar el mapa pulse el botón Construir mapa.
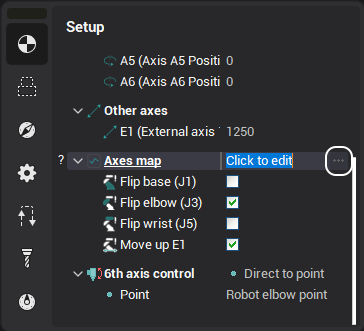
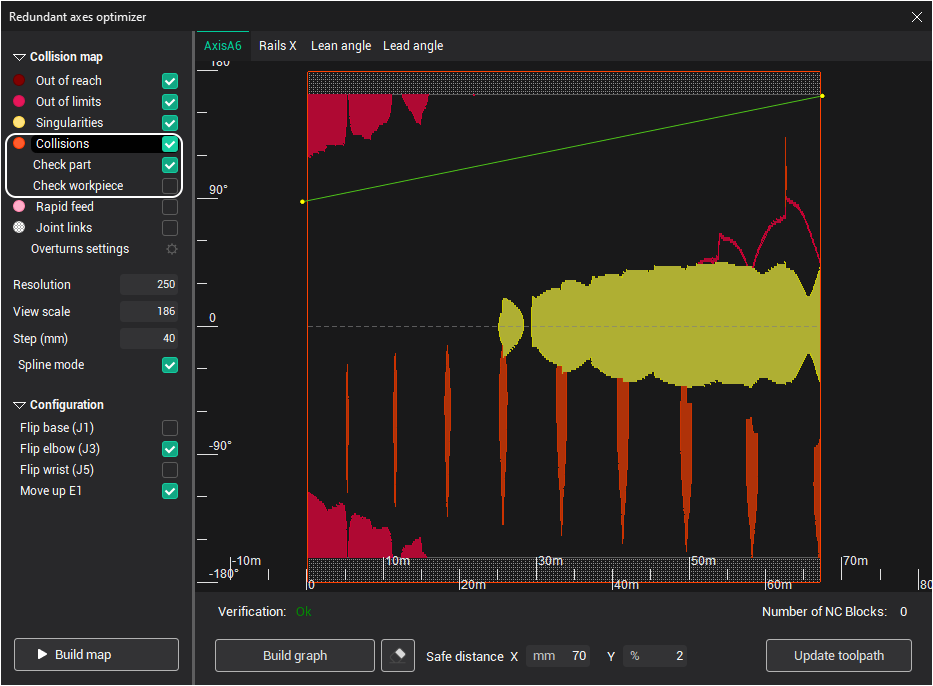
Comprobar la pieza y la pieza de trabajo
En la casilla de verificación 'Collisions' hay 2 casillas para especificar si parte y/o pieza de trabajo se contabilizan en la detección de colisiones. Sólo se habilitan si la casilla de verificación 'Collisions' padre está configurada como 'Verdadera' . Es recomendable cambiarlos dependiendo del tipo de mecanizado - corte, mecanizado aditivo, o soldadura.
Filtro de control del eje
La ley de control de ejes se define como una curva de spline. Por defecto no hay ninguna línea de spline. Significa que el valor del eje optimizado se mantiene igual (en modo manual) o se controla automáticamente (en modo automático) para toda la ruta de herramientas (la línea de rayas grises horizontales).
El objetivo es crear la curva más bonita posible que pase a través de la zona blanca libre de colisiones de izquierda a derecha.
Para crear un nuevo spline doble clic en los puntos en el espacio vacío que la spline tiene que pasar. Dos puntos es suficiente. Después de crear la spline puede cambiar su forma arrastrando los puntos de control de spline con el ratón, eliminando los puntos de control (haciendo clic derecho en un punto) o añadiendo nuevos puntos (sólo tire de la spline con el ratón).
Utilice el botón Borrar para borrar el spline.
Utilice el botón Construir automáticamente para construir la colisión evitando spline automáticamente.
Verificación
En esta área se muestra el estado de la ruta de herramientas actual. Si no hay colisiones en la ruta de herramientas se muestra el verde Ok, si hay alguna colisión, el número de colisiones se muestra en rojo. El estado se actualiza cada vez que cambia el eje de control spline.
Al mismo tiempo, en la vista gráfica, las zonas de colisión en la curva real del camino de herramientas también están marcadas con trazos gruesos del color correspondiente del tipo de colisión.
Puede hacer clic en el espacio vacío en el mapa de ejes o mover el ratón mientras mantiene el botón izquierdo del ratón para posicionar la herramienta a la posición correspondiente de la ruta de herramientas.
Regenerar el camino de herramientas
Para aplicar la ley de control de ejes al camino de herramientas haga clic en el botón Regenerar camino de herramientas.
Los ejes rotatorios revierten la detección y evitan
Es posible utilizar el mapa de ejes redundantes para comprobar los posibles problemas en el camino de herramientas causados por los ejes rotativos vuelcos. Los vuelcos ocurren si el eje rotatorio alcanza uno de sus límites y para continuar el mecanizado necesita hacer una rotación completa (360)°) hacia adelante o hacia atrás. En versiones anteriores no se disponía de información sobre los vuelcos porque, a pesar del vuelco, el eje siempre se mantiene dentro de sus límites.
Las líneas solidas claras y oscuras muestran las posibles ubicaciones de vuelco en el camino de herramientas en caso de que el spline se intersecta con ellos. Diferentes ejes rotativos, que pueden tener vuelco, tienen diferentes colores de línea. La intersección no siempre corresponde a vuelco; las ubicaciones de vuelco verdaderas se resaltan adicionalmente en el spline como puntos rojos en negrita con el signo de vuelco. También si hay vuelco en el camino de herramientas, su cuenta se muestra en la barra de estado "Verificación". Puede haber 2 tipos de vuelco:
el vuelco ocurre después del eje mínimo se alcanza (mostrado con el chasquido líneas)
después del eje máximo se alcanza (sólido líneas)
Conmutar el "Mostrar la leyenda del mapa" casilla de verificación para ver la información de color/estilo de las líneas de vuelco y otras anotaciones de mapas adicionales
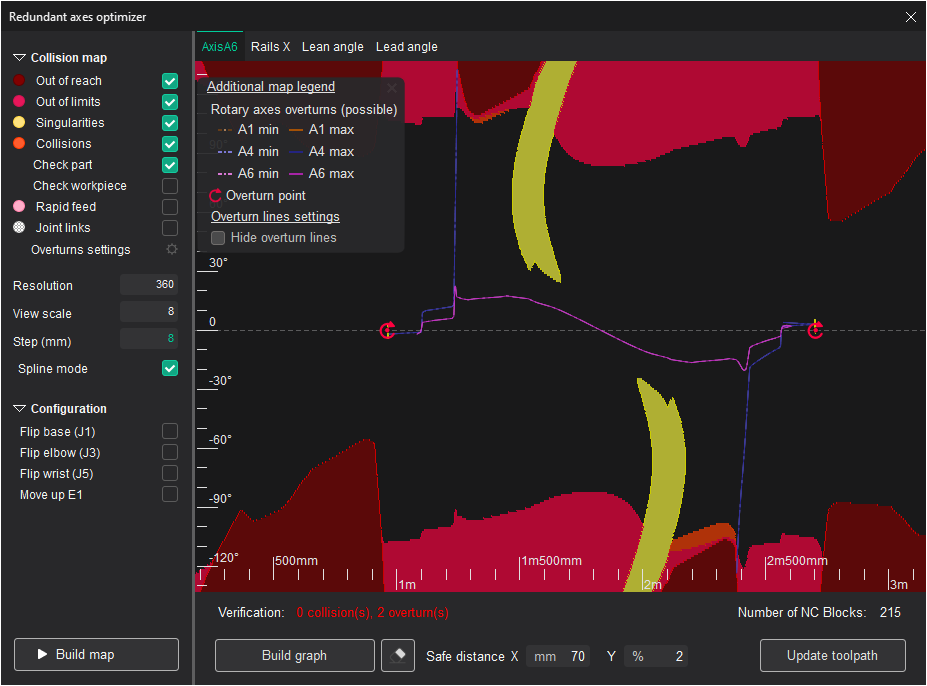
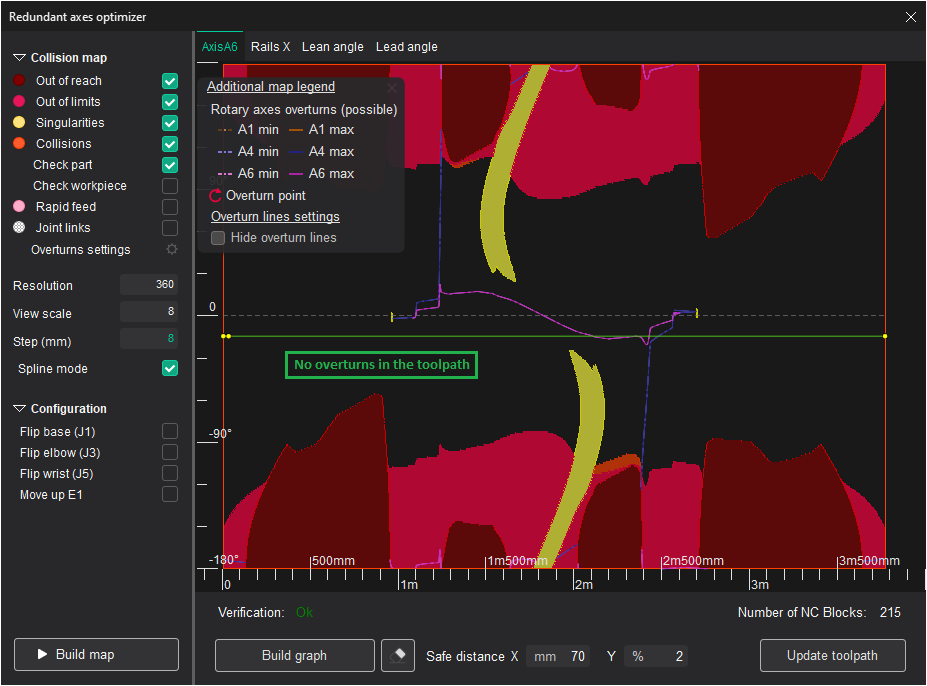
Captura de pantalla 1. El camino de herramientas contiene 2 vuelcos
Captura de pantalla 2. El spline se movió más abajo, por lo que no hay intersecciones con las líneas de vuelco. Como resultado, no hay vuelcos en el camino de herramientas ahora.
Si el camino de la operación contiene vuelcos, puede intentar evitar ellos moviendo el spline para que no se crucen las líneas dadas o las intersecciones son "falsas" (el valor del eje rotativo no alcanzó su límite todavía en este punto, pero su valor es igual al eje min/max modulo 360°).
En la captura de pantalla anterior, el spline fue cambiado a una línea recta, que no intersecta ninguna de las líneas azul/púrpura, lo que permitió deshacerse de los vuelcos en el camino de herramientas. También cambiar la configuración del robot (el "Codo del Flip", "Flip muñequera") también podría ayudar a evitar los vuelcos.
Control de parámetros de máquina arbitraria
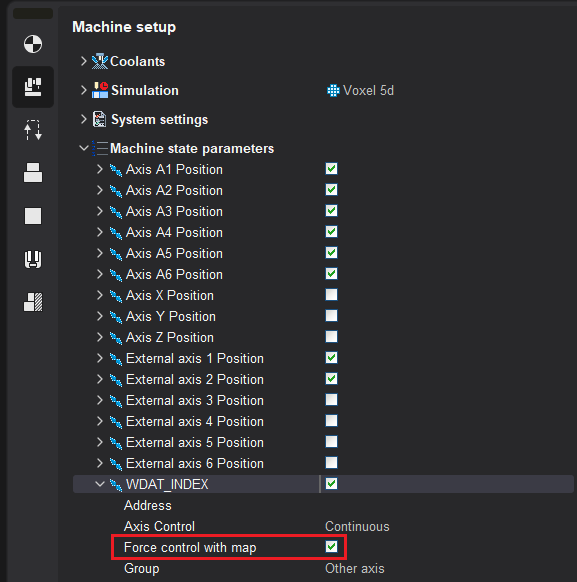
Si necesita controlar los cambios de un parámetro arbitrario (definido como un eje en el esquema de la máquina), puede activar el "Control de la fuerza con mapa" indicador en el parámetro de estado de la máquina correspondiente.
La bandera está disponible para cada parámetro de estado de la máquina en el "Configuración de la máquina → Parámetros de estado de la máquina" sección del inspector. Después de esto el eje aparecerá en la ventana de mapa de ejes, y, como de costumbre, puede definir el valor de parámetro en cada punto de ruta de herramientas utilizando spline.
También puede configurar este indicador directamente en el archivo xml de la máquina en el <Parámetro de estado de la máquina>, que corresponde al eje dado.
<SCType ID="WDATPOS" Caption="WDAT_INDEX" type="TMachineStateParameter"> ... <ControlWithMap DefaultValue="True"/></SCType>Evitación de la singularidad para la tabla rotativa de 2 ejes del robot
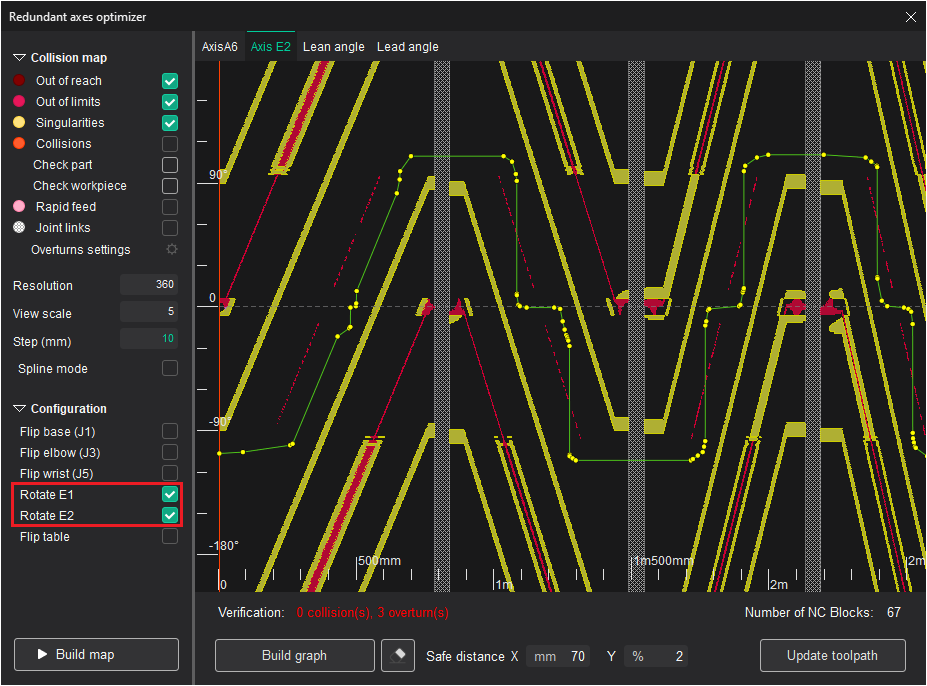
Anteriormente, Si necesitabas definir la trayectoria de una tabla rotativa de 2 ejes del robot, y ambos de la mesa rotativa flips están habilitadas (comúnmente denominadas como "Rotar E1" y "Rotar E2"), la trayectoria resultante podría contener zonas de singularidad, causando cambios muy agudos del estado de la tabla rotativa. Es por eso que el modo especial está habilitado en el mapa de ejes en este caso, similar a la Mapa de ejes para máquinas de 5 ejes. En este modo es necesario definir la trayectoria sólo para uno de los ejes de la tabla rotativa, el valor para el otro se calculará automáticamente para minimizar la desviación de la herramienta normal definida por la operación.
Las zonas verticales blancas del mapa corresponden a las zonas de singularidad. Utilizando spline se puede definir la trayectoria del eje E2 allí sin cambios bruscos.
Disponibilidad de la función
El mapa de hachas de robot está disponible para robots como parte del adicional 'Robot +' módulo para el sistema CAM' configuración:
Por defecto:
Robot
Como opción:
5x Mill*
Maestro*
Pro*
* - el adicional 'Robot +' licencia para robots de apoyo es necesaria.
Véase también: