Enfoques/retornos
Las partes de la trayectoria de la herramienta, definidas al principio y al final de cada trayectoria de la herramienta de contorno, se utilizan para el mecanizado correcto al principio y al final de un contorno. Estos movimientos se utilizan para habilitar varias funciones de interpolación como compensación, contracción, interpolación multiaxial, etc. Para habilitar estas características, es necesario incluir uno o dos movimientos adicionales.
El enfoque para el punto de partida tiene estos pasos:
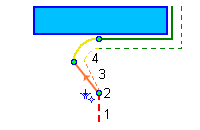
Acérquese al punto de carga del cable de alimentación rápida.
Carga de cables, modo de configuración de corte y modo de corrección e interpolación.
Primera parte de la entrada de plomo – movimiento lineal desde el punto de carga de alambre. En este paso se activan los modos habilitados.
Segunda parte de la entrada de plomo – pasar al punto de inicio del contorno de mecanizado. Es necesario para la entrada de plomo compuesto, por ejemplo, "línea y arco" de plomo.
Retráctate del punto final hace la secuencia en reversa:
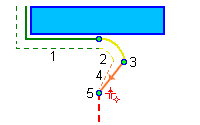
Mover al punto final del contorno de mecanizado.
Primer paso de lead-out – movimiento no lineal. Es necesario para el lead-out compuesto, por ejemplo, para "línea y arco" lead-out.
Apague la corrección e interpolación.
Segundo paso de salida – movimiento lineal.
Punto de ruptura del cable.
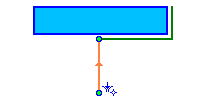
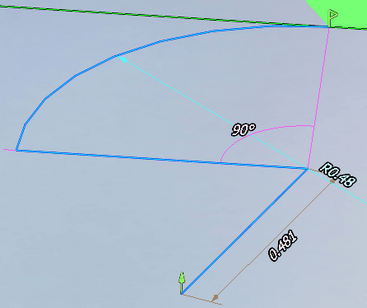
Los parámetros lead-in/lead-out se definen en la ventana de gráficos.
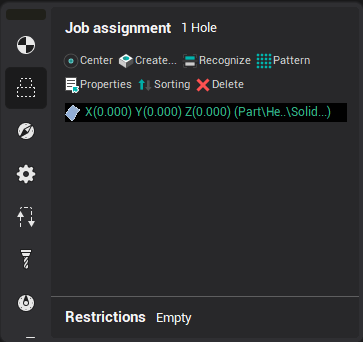
Los marcadores Approach\returns están disponibles para cada elemento de la asignación de trabajo y están disponibles después del cálculo de la operación. Después de cambiar los parámetros es necesario volver a calcular la operación. El enfoque es verde, el retorno es amarillo.
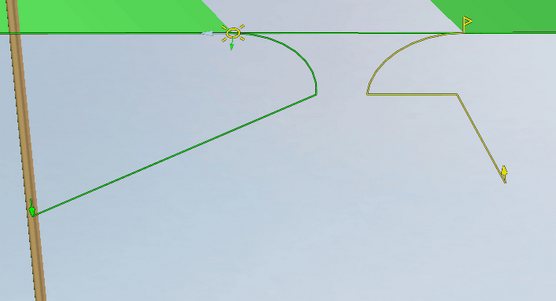
Los marcadores de aproximaciones\returns son totalmente interactivos. Es posible moverlos y especificar las dimensiones. Las dimensiones se pueden establecer en relación con otros elementos, así como con el sistema de coordenadas.
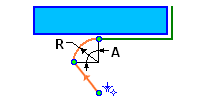
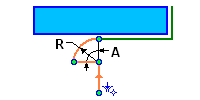
Es posible seleccionar el modo de plomo en el panel emergente:
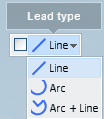
<Lead-type> – este panel se utiliza para configurar el tipo de plomo. Hay varios tipos de plomo disponibles en la lista desplegable:
<Line> – movimiento lineal desde el punto de carga del alambre hasta el punto de inicio del contorno del mecanizado. La longitud del movimiento lineal está determinada por la posición del punto de carga del alambre.
<Arc> – lead-in tiene un movimiento lineal desde el punto de carga del alambre hasta un punto de inicio del arco. El movimiento del arco es tangente al inicio del contorno del mecanizado.
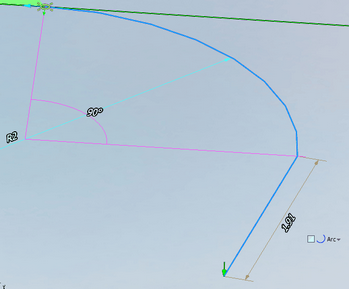
<Línea y arco> – el primer movimiento lineal se mueve desde el punto de carga del cable hasta el punto central del arco, luego hasta el punto de inicio del arco. A continuación, el arco se mueve tangente al punto de inicio en el contorno.
Atención: Todos los puntos de carga de alambre o de ruptura de alambre que se utilizan cuando se calcula una operación, se pueden ver en el panel <Tecnology> <Holes>. Además, puede exportar esta lista de puntos para usar en otro proyecto de sistema CAM u otra aplicación. Se accede al comando de exportación desde el menú principal del sistema CAM o del menú contextual de la lista de agujeros <Exportar seleccionado en DXF...>.
Opciones de compensación del radio de alambre
El sistema CAM puede calcular, ver y simular el movimiento del alambre utilizando la compensación para el radio del alambre. Indemnización encendido y apagado incluidos en la CLData. Estos son generalmente <G41>, <G42>, <G40> códigos con un número de compensación. El sistema CAM dibujará la trayectoria del movimiento del alambre y puede simular el mecanizado con la compensación del radio del alambre.
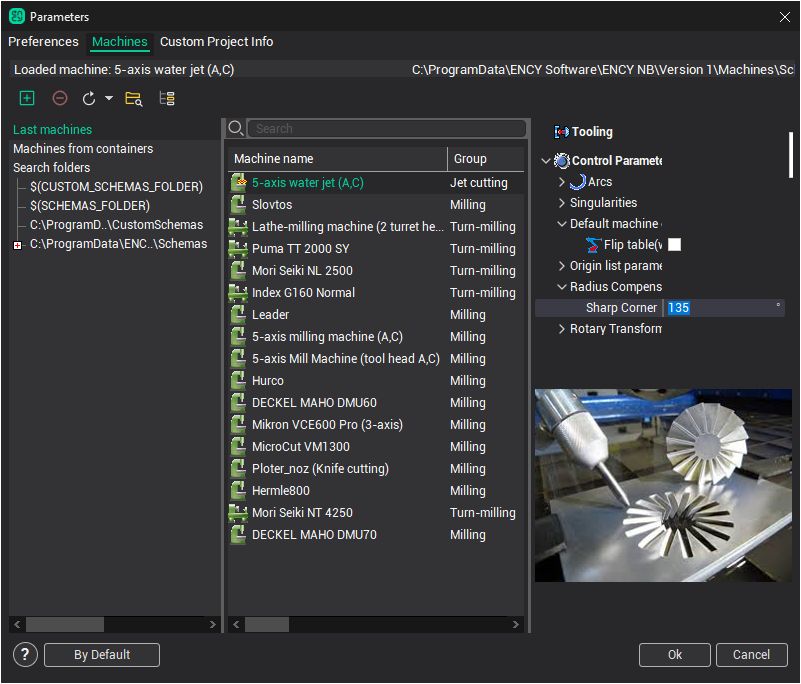
Diferentes máquinas NC pueden utilizar diferentes métodos para aplicar / cancelar compensación. El sistema CAM tiene varias opciones que se pueden utilizar para 'afinar' compensación de radio de alambre del sistema CAM para que coincida con los utilizados por el control de la máquina. Estas opciones están disponibles en la ventana <Machine: ... Parámetros > en la pestaña <Machines>. Hay un nodo llamado <Parámetros de control> –> <Compensación de Radius> un editor de propiedades, las propiedades se utilizan para afinar la simulación del sistema CAM de compensación de radio.
Use estas propiedades:
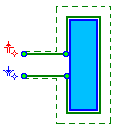
<Aproximación normal> – utilizado para afinar el movimiento en la aproximación y retraer.
|
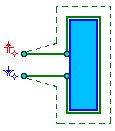
Cuando <Normal approach> está activado. El punto de mecanizado inicial y final permanece en el contorno normal. |
Cuando <Normal approach> está desconectado. Los puntos de mecanizado iniciales y finales se desplazan por el valor de compensación del radio. |
|
|
|
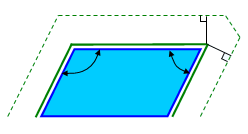
<Sharp corner> – este valor define el método de redondear una esquina. Si el ángulo entre los movimientos es mayor que este valor entonces el movimiento se extenderá para intersecarse. De lo contrario, si el ángulo es menor, entonces cada movimiento se extenderá por el valor de la compensación de radio y conectado por un movimiento lineal. En el dibujo de abajo se muestra un ejemplo donde la esquina "izquierda" es mayor que el valor de la esquina afilada, pero el de la "derecha" es menor.
Véase también: