Transiciones del robot de programación (método obsoleto)
La programación de las transiciones del robot entre operaciones se realiza especificando los puntos de aproximación y retorno en la configuración de la operación. Barra de herramientas de edición de mociones en modo de simulación.
Echemos un vistazo al siguiente ejemplo.
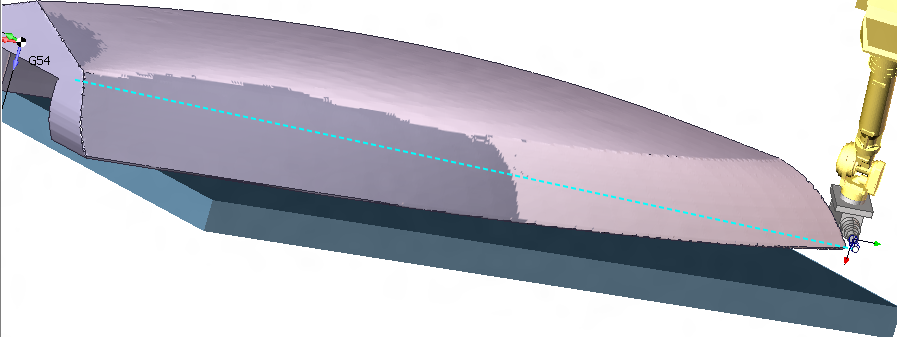
Una vez calculadas las operaciones, la simulación ha revelado que la transición entre dos operaciones agujerea la pieza. Para modificar la transición se debe formar la lista de puntos intermedios por los que pasará el robot.
La mejor manera de hacerlo es utilizando el panel de control de la máquina.
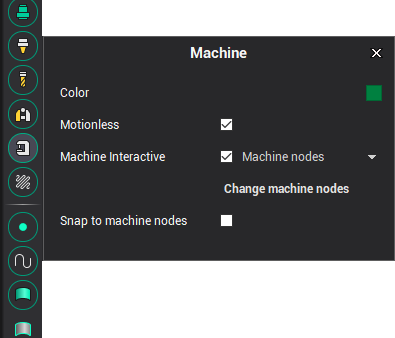
Pero primero, asegúrese de que el <Máquina Interactivo> el modo está activado.
En la pestaña <Simulation> seleccione el último comando de la primera operación (5D Contouring) como se muestra en la imagen de abajo. Para definir el primer punto de control arrastre la herramienta a la posición deseada con el ratón.
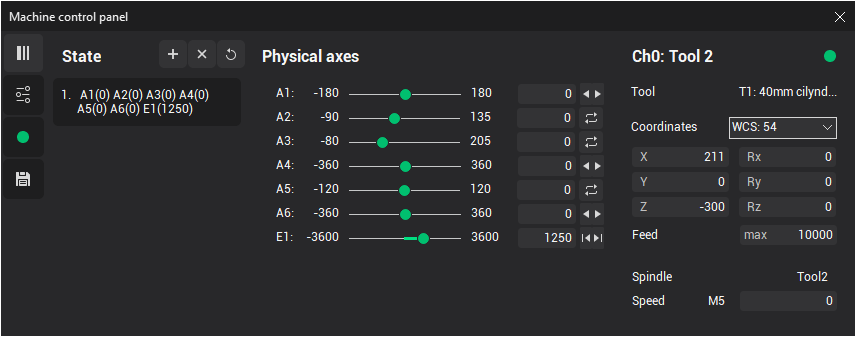
A continuación, golpear el <Visibilidad del panel de Estados> botón en el <Panel de control de la máquina> para guardar la posición en la memoria.
A continuación, repita los pasos para recordar el resto de los puntos intermedios de transición.
Después de ese cambio a la pestaña <Tecnología>, active la primera operación (5D Contour) en el árbol de trabajos, y seleccione <Custom...> en el menú desplegable Parámetro Retorno en la Configuración de Operación como se muestra en la imagen de abajo.
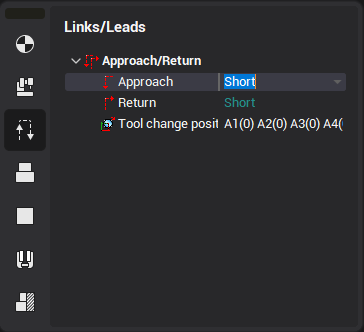
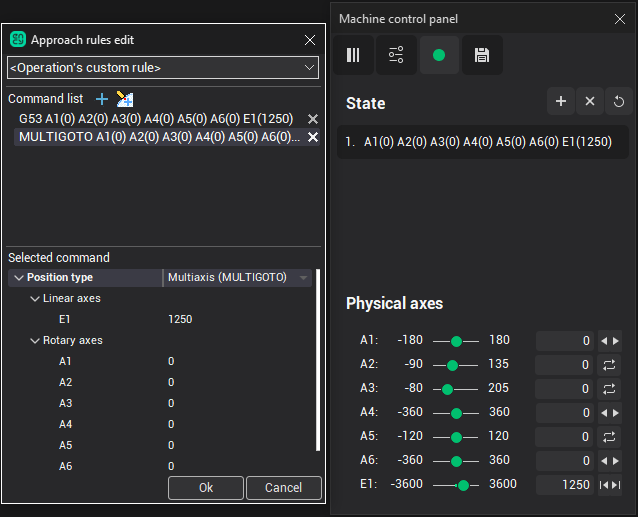
Asegúrese de que el <Panel de control de máquinas> está abierto. Seleccione el primer punto de control recordado en el panel de control de la máquina. El robot debe colocarse en el estado recordado. A continuación, pulse el botón <Añadir estado actual> en la ventana <Aproximar/return points list edit> para añadir la posición actual del robot como punto intermedio de retorno como se muestra en la imagen de abajo.
Si los valores exactos de los ejes no son importantes, los puntos de control se pueden añadir directamente sin la formación de la lista.
Del mismo modo se puede definir la secuencia de aproximación de la segunda operación (5d Contouring2).