Funcionamiento del sistema de coordinación local
Área de aplicación:
Permite generar una trayectoria dentro de un sistema de coordenadas adicionalmente offset y rota con respecto al sistema de coordenadas de la pieza de trabajo. Por ejemplo, un programa para el mecanizado de un bolsillo inclinado con respecto al sistema de coordenadas de la pieza de trabajo será mucho más simple si se deriva en un sistema de coordenadas local alineado con la inclinación del bolsillo. Este método se utiliza para el mecanizado posicional de 5 ejes (3+2). Al seleccionar el valor 'Auto', la dirección del eje Z en el sistema de coordenadas local se establece automáticamente a lo largo del eje de rotación de la herramienta, que se define por parámetros en el grupo de orientación de herramientas.
Principios de trabajo
Una operación genera el camino de herramientas en un sistema de coordenadas local. Por defecto, una operación genera el camino de herramientas en el sistema de coordenadas de pieza de trabajo (G54). Sin embargo, puede cambiar este comportamiento especificando el parámetro CS local en el panel de configuración.
El parámetro se puede definir de dos maneras. Puede seleccionar el sistema de coordenadas local de la lista desplegable, y puede configurar el sistema de coordenadas local en el modo interactivo haciendo clic en el botón elipses.
La lista desplegable contiene las siguientes opciones:
1. <Off> - el sistema de coordenadas local está desactivado - el camino de herramientas se genera en el sistema de coordenadas de pieza de trabajo.
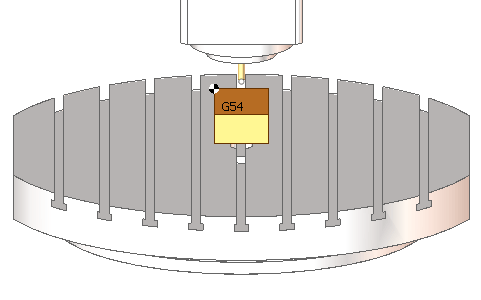
Máquina inicial configuración (A0 C0). G54 está en la esquina superior izquierda de la pieza, el punto de herramientas está en la punta de la herramienta.
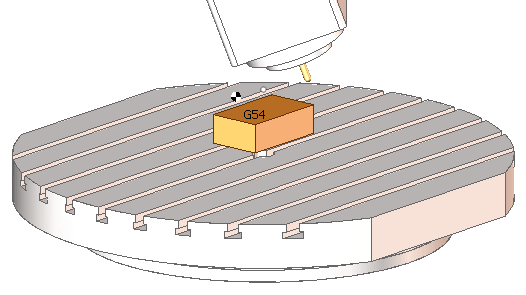
Configuración de la máquina después de 5 ejes de posicionamiento sin CS local activado (A20 C-40). La pieza de trabajo y la herramienta se mueven, pero el G54 y el punto de herramientas siguen siendo los mismos. El camino de herramientas generado dependerá de la configuración de la pieza y la longitud de la herramienta.
2. <Auto> - la posición del sistema de coordenadas local está determinada por la posición actual de los ejes rotativos de la máquina. Los ejes Z del LCS están alineados a la dirección del eje de la herramienta. El origen del LCS coincide con la posición del punto cero de la pieza de trabajo (G54), pero se puede reubicar fácilmente en el modo interactivo (el botón elipses).
Máquina inicial configuración (A0 C0). G54 está en la esquina superior izquierda de la pieza, el punto de herramientas está en la punta de la herramienta.
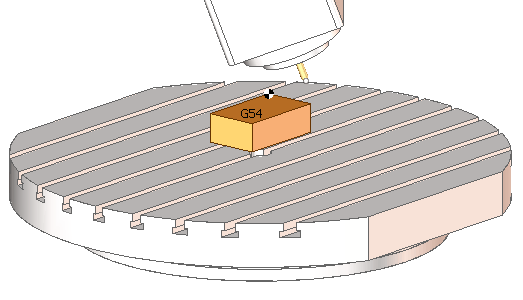
Configuración de la máquina después del posicionamiento de 5 ejes con CS local ajustado a AUTO (A20 C-40). El G54 está de nuevo en la esquina superior izquierda de la pieza de trabajo, el punto de herramientas está de nuevo en la punta de la herramienta.
Por lo tanto, en general debe utilizar la opción Auto del parámetro local CS. Para obtener más información, consulte la sección Funcionamiento del sistema de coordinación local tópico.
3. La lista geométrica sistemas de coordenadas. Para definir el sistema de coordenadas local de operación exactamente lo mismo que desee puede crear un sistema de coordenadas geométricas apropiado y seleccionarlo de la lista desplegable CS local.
Cuando habilita un sistema de coordenadas local CAM genera el comando Origin en la sección de cabecera de la CLData. El comando Origin contiene todos los datos necesarios para el camino de herramientas postprocesamiento. Estos son:
1. MCS - la posición del sistema de coordenadas local en relación con el sistema de coordenadas de la máquina (G54). Esta matriz se utiliza en los controles antiguos sin la función de gestión del punto central de la herramienta (TCPM).
2. WCS - la posición del sistema de coordenadas local en relación con el sistema de coordenadas de la pieza de trabajo (G54 girado junto con la pieza de trabajo). Esta matriz se utiliza en los controles con la función TCPM.
3. Coordenadas de los ejes rotativos posicionando el eje de la herramienta a lo largo del eje z del sistema de coordenadas local.
Al hacer clic en el botón elipses al lado del parámetro local CS, introduzca el modo interactivo de la definición local CS. Después de posicionar el sistema de coordenadas local, haga clic en Aceptar para aplicar los cambios. Ver más
Además, algunos controles no soportan la definición de un sistema de coordenadas local por ángulos espaciales. Estos controles requieren que el CS local esté definido por los ángulos rotativos reales de la máquina, alineando la dirección del eje de la herramienta a lo largo del eje Z del sistema de coordenadas local. El sistema CAM soporta dichos controles. La opción correspondiente está disponible bajo la sección Parámetros de control en las propiedades de la máquina.
Otra característica de control es el modo de posicionamiento local CS. Esta opción determina el comportamiento del control cuando trata el comando Origin. El sistema CAM soporta los siguientes modos de posicionamiento local CS. (Configuración de la máquina - Parametros de control - Mecanizado de 5 ejes indexado - Sistema de coordenadas locales (ORIGIN)
1. Estancia - el comando de origen no mueve los ejes de la máquina.
2. Girar - el comando de origen gira los ejes de la máquina de tal manera que la dirección del eje de la herramienta se alinea con el eje Z del sistema de coordenadas local.
3. Mover - el comando de origen gira los ejes de la máquina para alinear el eje de la herramienta con el eje Z del sistema de coordenadas local y mueve los ejes lineales de tal manera que la posición de la punta de la herramienta se mantiene igual en relación con la pieza de trabajo.
En la siguiente tabla hay comandos para los controles CNC más comúnmente utilizados que pueden ser generados por el postprocesador en lugar del comando <ORIGIN> .
|
Origen |
G92 G68 |
TRANS ROT |
Ciclo 7 Ciclo 19 |
Véase también:
Configuración de las operaciones
Sistemas de coordenadas geométricas
Sistema de coordenadas de la máquina G54 - G59