Panel de configuración
Área de aplicación:
La pestaña Configuración se utiliza para configurar los parámetros primarios del proyecto. Esto puede implicar el posicionamiento de la pieza en el equipo, el sistema de coordenadas de la pieza, y más.
Configuración y herramientas.
Método de simulación.
Cambia el método de modelado. Cada uno de estos modos tiene sus propias ventajas y desventajas. 'Voxel 5D' es el modo predeterminado. Permite el modelado rápido, mientras que el modelado 'Solid' toma más tiempo pero ofrece mayor precisión. Por ejemplo, cuando se trabaja en pequeños agujeros en gran parte, sería necesario elegir el modelado 'Solid'.
Orientación de herramientas.
Determina la dirección de orientación de la herramienta. Ver más
Este grupo especifica los ejes rotacionales primarios.
Coordenadas de la herramienta en WCS
Esta pestaña muestra sistemas de coordenadas geométricas. Entre paréntesis, se muestra el nombre del eje físico correspondiente al movimiento a lo largo de un eje específico.
Ejes físicos lineales
Coordenadas de los valores de los ejes lineales de la máquina en relación con el punto cero físico de ese eje (el sensor final de ese eje). Coordenadas de la herramienta en WCS.
Otros ejes
Este grupo especifica los ejes auxiliares, tales como los ejes relacionados con el movimiento de las mordazas.
Mapa de hachas
Los Mapa de hachas permite definir leyes de control automático manuales y afinadas para los excesivos grados de libertad de un robot (el sexto eje, los ejes de raíles, los ejes de mesa rotativa). La función está disponible pulsando el botón de elipsis junto al parámetro de mapa de hachas. Para optimizar el procesamiento, es posible cambiar entre los diferentes ejes disponibles del equipo.
Control del sexto eje
Para posicionar una herramienta axial (milla, haz, chorro), se requieren cinco grados de libertad. Un robot industrial estándar tiene seis ejes. Si la herramienta no está alineada con el eje de rotación de la última articulación del robot, hay infinitas posibilidades de posicionar el robot precisamente en un punto particular girando la herramienta alrededor de su propio eje. Esto proporciona flexibilidad adicional en el acceso a áreas difíciles de alcanzar, ayuda a eludir varias singularidades cinemáticas y evita colisiones mecánicas entre componentes del equipo. Ver más
Directo al punto.
En este modo se especifica un punto 3d que atrae el punto de intersección de los ejes 5o y 6o a la distancia mínima durante el mecanizado.
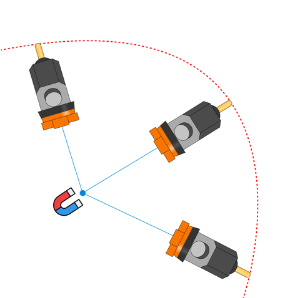
Punto.
Punto base del robot. En este modo, el punto se posicionará en el punto hogar/base del robot
Robot codo punto. En este modo, el punto se posicionará en el codo del robot.
Personalizado. En este modo, la ubicación del punto se determinará de acuerdo con las instrucciones del usuario.
Vector fijo.
En este modo se define la dirección deseada de la brida del robot (6o eje) en el sistema de coordenadas de la base del robot.
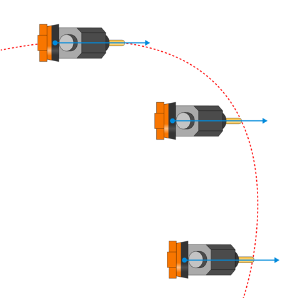
Vector. Vector para el sexto eje del robot.
Ruta de la herramienta
En este modo un eje de TCP está alineado con la dirección de ruta de la herramienta.
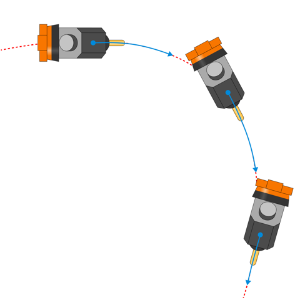
Desviación angular. Define un ángulo adicional para el sexto eje a lo largo de la herramienta.
Aproximación tangente