Normas de enfoque y retorno
Las reglas de aproximación y retorno definen una ruta adicional de aproximación/retorno de la herramienta hacia/desde el primer/último punto de mecanizado. Cuando se utiliza junto con la regla de aproximación de posición de cambio de la herramienta determina una ruta de herramienta desde una posición de cambio de herramienta hasta el primer punto de mecanizado, mientras que la regla de retorno determina una ruta de herramienta desde el último punto de mecanizado a una posición de cambio de herramienta.
Definición de la norma de aproximación/retorno de una operación
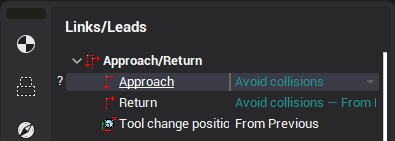
La regla de aproximación/retorno se especifica en la sección Enfoque/retorno de la operación Vínculos/Líderes panel de inspector. La casilla de verificación indica si el enfoque/retorno se genera automáticamente para evitar colisiones .
-
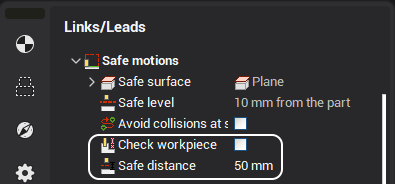
Evitación de colisiones - generar trayectoria de aproximación/retorno automáticamente con algoritmo especial, evitando colisiones de la máquina. Desactive la casilla de verificación para seleccionar este tipo de aproximación/retorno. Si este tipo es elegido, puede definir adicionalmente " Distancia segura " y " Comprobar la pieza de trabajo " parámetros para el enfoque/retorno.
Si la casilla de verificación de aproximación/retorno es activado , esto significa que la regla se define explícitamente o tiene uno de los tipos especiales listados a continuación. El campo de edición muestra la regla real, calculada de acuerdo con el tipo de aproximación/retorno (oculto). Para ajustar la aproximación/retorno utilizada por la operación sólo puede editar el comando directamente.
Tipos de definición de enfoque/retorno
El enfoque/retorno puede tener uno de los siguientes tipos de definición. Este tipo está oculto, y se muestra sólo en el Formulario de edición de reglas de retorno de aproximación .
-
Regla predeterminada - el enfoque/retorno de una operación de nueva creación tiene este tipo. Para restablecer la regla de nuevo al predeterminado, limpie el campo de edición y presione <Enter>. Los siguientes factores que se consideran durante el cálculo de la regla real del tipo predeterminado (en prioridad decreciente):
-
si la submáquina se define para el soporte de la pieza de trabajo de la operación / par soporte de la herramienta, a continuación, utilice el aproximación/retorno de la submáquina . Véase Definición de la submáquina en los esquemas de la máquina para más información sobre las submáquinas.
-
si la operación tiene el mismo portapiezas y conector de herramienta que la operación anterior, entonces se toma la aproximación/retorno de la operación anterior .
-
utilizar de otra manera la regla de la operación etapa de configuración o la regla definida en la primera operación del árbol de operaciones ( la máquina ), en caso de que no haya etapas de configuración o la operación es una etapa de configuración en sí.
-
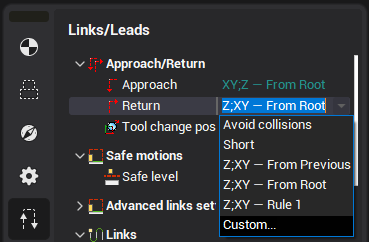
2. Regla de la operación anterior .
3. Regla de la operación raíz - utilizar la regla, especificada en el árbol raíz de operaciones en la pestaña 'Tecnología' (no la regla única definida en la máquina, como en el anterior sistema CAM heredado).
4. Personalizado - la regla se define explícitamente como la lista de comandos.
5. Corto - no se añaden puntos adicionales en el camino de herramientas. Una herramienta se mueve de una posición de cambio de herramienta al primer punto de un camino de herramientas de mecanizado directamente por la distancia más corta. Si la máquina es robot, entonces este movimiento se hace utilizando ejes físicos (PhysicGOTO).
6. Regla(s) de la lista de enfoque/retorno de la máquina - operación puede hacer referencia a uno de los elementos de la máquina enfoque/lista de devoluciones . Se pueden especificar varios enfoques/retornos en la máquina bajo nombres significativos. Primero, se muestra el nombre de la regla, luego, entre corchetes, la secuencia de comandos de la regla. Más información sobre la lista está disponible en el artículo separado.
Reglas de aproximación/retorno sintaxis
A " Personalizado " enfoque/regla de retorno define explícitamente la salida CLData en la sección "Aproximación" o "retorno" del camino de herramientas. Una sola regla de aproximación o retorno consiste en varios comandos , que están separados por el semicolons A comando es definido por el palabra clave , que puede ir seguida de la lista de nombres y valores del eje de la máquina (coordenadas).
< Lista de valores de ejes > se define como una lista separada en blanco de los ids (o direcciones) del eje de la máquina con posiciones exactas opcionales de los ejes de la máquina en el estado que corresponde al dado comando . El valor del eje puede especificarse entre paréntesis o directamente después del id del eje. Ejemplos de las definiciones de valor del eje:
-
X100 Y(200) Z
-
A1 A2(253.2) A3(100.4) A4 A5 A6
Lo siguiente: tipos de comandos ( palabras clave ) se apoyan:
-
< MultiGOTO > (o sin comando) + < Lista de valores de ejes > - define el movimiento de múltiples coordenadas (" Multigoto " CLData node).
-
< FísicoGOTO > (o < G53 >) + < Lista de valores de ejes > - define el movimiento en coordenadas de ejes físicos (" Physicgoto " CLData node).
-
< Goto > + < Lista de valores de ejes > (debe ser "X", "Y" o "Z") - define el movimiento lineal simple (" Goto " CLData node).
-
< GOHOME > + < Lista de valores de ejes > - movimiento a la posición "Cambio de herramientas" (" GOHOME " CLData node). Destinado a ser utilizado únicamente en las reglas de retorno.
-
< LCS > - comando multipropósito. La lógica común es que algún modo de mecanizado está habilitado en el lugar particular en el enfoque, y luego desactivado usando el mismo comando en el retorno. La salida CLData depende de los parámetros de operación:
-
Si la Funcionamiento del sistema de coordinación local está activado, a continuación, el comando de habilitar LCS (" Origin LCS: On ") se produce dentro del enfoque, y el LCS inhabilitar ( Origin LCS: Off ) a la vuelta.
-
-
Si la "gestión de puntos centrales de herramientas" está activada, entonces el modo TCPM activa el comando (" Interp 5axis: On ") se produce dentro del enfoque, y el TCPM deshabilitar ( Interp 5axis: Off ) a la vuelta.
Nota: El modo "TCPM" no se puede usar simultáneamente con el sistema de coordenadas local.
-
-
Interpolación polar habilitar/desactivar
-
Giro del eje U modo activar/desactivar
-
-
< SLCS( ... ) > - utilizado para temporal habilitando el "Sistema de coordenadas local" dentro del enfoque o retorno. Vea la sección "Aproximación para las operaciones habilitadas TCPM" a continuación para obtener más información sobre esta característica.
Aproximación/retorno para las operaciones habilitadas TCPM usando CS Local
El modo "Gestión de puntos de cambio de herramientas" se utiliza comúnmente en el mecanizado de 5 ejes, pero surgen algunos problemas cuando la cinemática de la máquina y el montaje de la pieza de trabajo no coinciden completamente con la cinemática real de la máquina y el montaje de piezas. SLCS( ... ) bloque, en el "Sistema de coordenadas local" específico antes el modo "TCPM" está activado en la aproximación. Si el < SLCS() > comando se utiliza el modo "TCPM" se activará en el fin del enfoque; se desactivará al principio del retorno, si la secuencia de órdenes dada está en la regla de retorno.
El LCS utilizado por este comando no está definido por los parámetros de las operaciones, en su lugar, corresponde a la primer punto del camino de la herramienta, si el < SLCS El comando > está dentro del Sección de enfoque y a la Comisión último punto del camino de herramientas, si el comando está dentro del sección de devolución . El ejes rotativos los movimientos deben hacerse antes la habilitación de este LCS.
Dentro de los soportes se pueden especificar uno o más comandos de movimiento, por ejemplo SLCS(G53 X100; YZ). Estos movimientos se realizarán en el sistema de coordenadas local dado. Ejemplo de la regla de enfoque completo usando < SLCS() >:
G53 Z(-0.5); G53 X(0.5) Y(-0.5); AC; XY; SLСS(XYZ)Edición avanzada de reglas de aproximación/retorno
El campo de edición permite un ajuste rápido de la aproximación/retorno de la operación. Si necesita, por ejemplo, vincular la aproximación de la operación con la operación anterior o especificar una larga secuencia de comandos, utilice el método/formulario de edición de retorno . Para abrirlo utilice el botón elipsis del campo de edición. También permite editar la lista de enfoque/retorno de la máquina.
Véase también:
Lista de aproximación/retorno de la máquina
Ventana de edición de reglas de aproximación/retorno
Definición de la submáquina en los esquemas de la máquina
La lista de los comandos básicos de datos CL
Configuración de las operaciones