La planificación de los enlaces
El sistema CAM utiliza el algoritmo de evitación de colisiones para planificar la ruta rápida de la herramienta entre las operaciones y dentro de ellas. El algoritmo requiere una descripción fiable de la célula robótica, ya que se basa en la comprobación de colisión entre los nodos de la máquina.
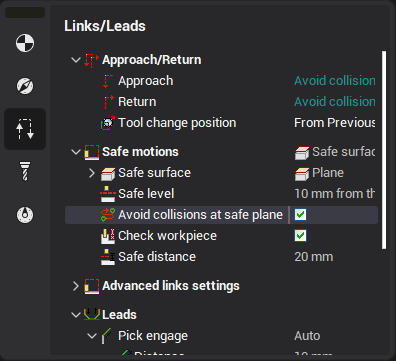
Enciende el "Evitar colisiones en un avión seguro" para activar el algoritmo dentro de la operación. El parámetro "Distancia segura de los enlaces" define la distancia mínima permitida a la colisión. Este valor debe ser mínimo y suficiente. Si es demasiado pequeño entonces el camino de la herramienta no es lo suficientemente seguro. Si la distancia segura es demasiado larga, entonces el enlace no se puede construir o el tiempo de cálculo será inaceptable.
Operaciones apoyadas
Esta opción está disponible actualmente sólo para robots en las siguientes operaciones (y sus operaciones descendientes, si no son deshabilitados intencionadamente):
Enlace puntos de inicio y final
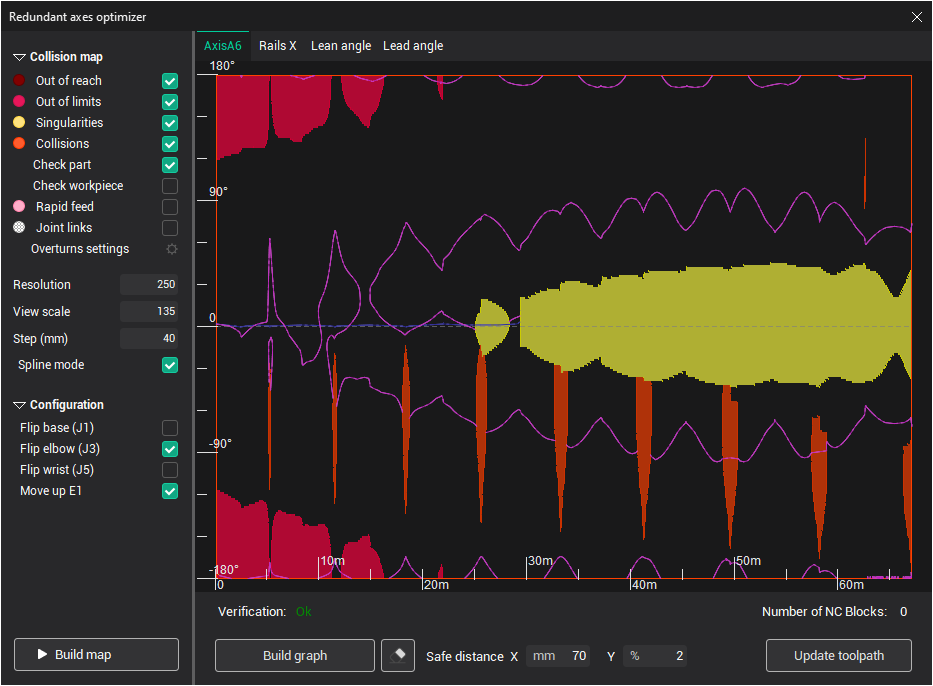
Es importante asegurarse de que el punto de inicio y final de un enlace se encuentra fuera de colisión, de lo contrario se generará la ruta de herramienta incorrecta. Se puede hacer con el optimizador de ejes extra. Las zonas grises del mapa corresponden a los enlaces. Las restricciones no se muestran en estas zonas. Por lo tanto, el spline tiene que evitar todas las colisiones.
Colisiones de piezas de trabajo
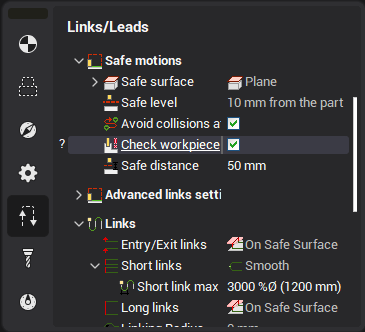
Por defecto, el algoritmo sólo tiene en cuenta la pieza al comprobar las colisiones. Para permitir la evitación de colisiones entre la herramienta (o máquina) y la pieza de trabajo, utilice el 'Comprobar la pieza de trabajo' opción.
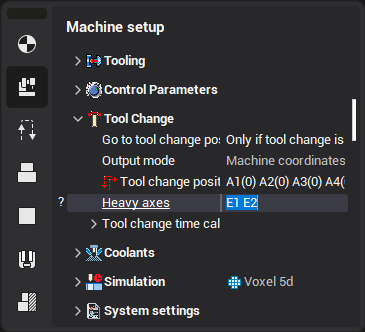
Excluir el movimiento de ejes
Los El algoritmo de evitación de colisiones utiliza todos los ejes de la máquina para buscar el camino desde el principio hasta el punto final. Si desea excluir o minimizar los movimientos por algunos ejes, entonces estos ejes deben ser enumerados en la lista de ejes pesados de la máquina. Si el enlace requiere el movimiento por los ejes pesados, entonces se realiza en 3 etapas: La primera es el movimiento a la posición de cambio de la herramienta, después de que el movimiento de ejes pesados y luego el movimiento hasta el punto final.